Questões de Concurso
Sobre controladores (proporcional, pi e pid) em engenharia eletrônica
Foram encontradas 155 questões
Em um sistema de automação predial, o controlador é caracterizado por ser um equipamento eletrônico com diversas interfaces elétricas, ou seja, módulos de entrada e de saída. Acerca de características genéricas desse equipamento, julgue o item subsequente.
Válvulas acionadas mecanicamente por solenoides são,
normalmente, acionadas eletricamente por interfaces de saída
digital do controlador.
Em um sistema de automação predial, o controlador é caracterizado por ser um equipamento eletrônico com diversas interfaces elétricas, ou seja, módulos de entrada e de saída. Acerca de características genéricas desse equipamento, julgue o item subsequente.
Entradas analógicas são embasadas em dispositivos de
chaveamento do tipo TRIAC, sempre que o sinal elétrico de
excitação for do tipo corrente contínua.
Em um sistema de automação predial, o controlador é caracterizado por ser um equipamento eletrônico com diversas interfaces elétricas, ou seja, módulos de entrada e de saída. Acerca de características genéricas desse equipamento, julgue o item subsequente.
Se, em uma interface de entrada, existir a especificação de
corrente na faixa de 4 mA a 20 mA, é correto inferir que essa
interface aceita um sinal de entrada analógico.
A respeito dos controladores PID, pode-se dizer que:
I. Usualmente, as perturbações no carregamento são de baixa frequência, já os sensores de ponta são de alta frequência.
II. O controle PID geralmente traz bons resultados se a planta dinâmica dominante é de segunda ordem.
III. A antecipação da ação derivativa reage à taxa rápida de variação do erro.
Assinale:
utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
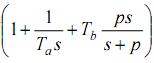 , em que K é o ganho do controlador,
, em que K é o ganho do controlador,  são as constantes de tempo integral e derivativo, respectivamente, e p é um polo para limitação de ganho em altas frequências.
são as constantes de tempo integral e derivativo, respectivamente, e p é um polo para limitação de ganho em altas frequências.utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
 , respectivamente.
, respectivamente.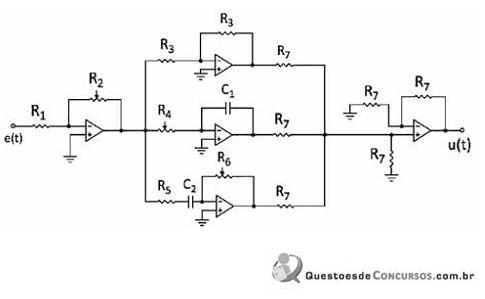

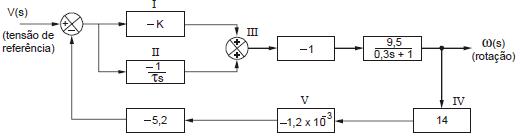
I. Sistema de controle proporcional-integral de velocidade de um motor DC:
II. Circuito integrador:
No sistema, o circuito integrador está representado pelo bloco
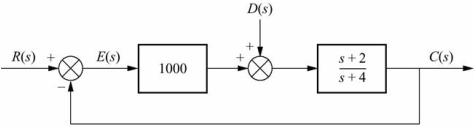
A componente do erro de estado estacionário devido a uma perturbação em degrau, para o sistema abaixo é:
Um circuito digital de controle deve acionar uma carga AC por meio de uma interface de potência com relé, conforme o circuito abaixo:
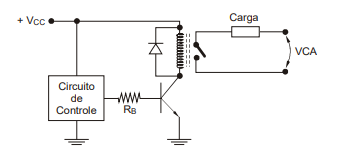
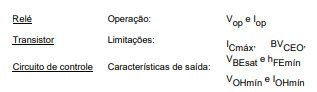
Especificações do relé, transistor e circuito de controle:
A função de transferência de um controlador PI é dada
por: 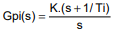
Um zero nesta função vale
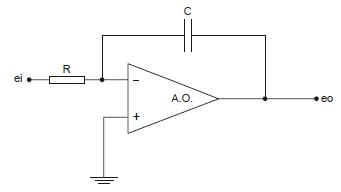
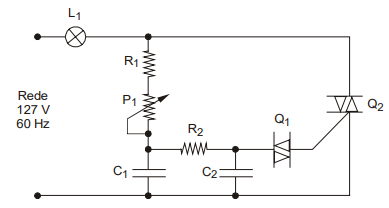
Considere o circuito abaixo.
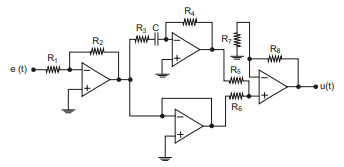
Este circuito é um controlador do tipo