Questões Militares
Sobre álgebra linear - equações lineares, espaço vetorial e transformações lineares e matrizes em matemática
Foram encontradas 109 questões
Sejam P3(R) = (p = a0 + a1x + a2x2 + a3x2; a0,a1,a2,a3 ∈ R ) e a aplicação linear T : P3 (R) → P3 (R) definida por T(p) = p ” + p ' - 2 p onde p", p' representam respectivamente, a segunda e a primeira derivada do polinômio p ∈ P3(R ) em relação à variável real x . Então
I. Em relação à base { x3,x2,x,1}, T é isomorfismo.
II. A dimensão do espaço imagem de T é igual a 4.
III. O núcleo de T é o subespaço [ ex, e-2x ].
IV. Na base {1,x,x2,x3}, a matriz de T tem traço nulo.
Para se estudar a influência das variáveis % de Proteína na ração (X1) e Temperatura ambiente (X2) no Ganho de peso em kg (Y) de bovinos, foram observadas essas variáveis em dez animais em um experimento controlado. Os seguintes resultados foram registrados:
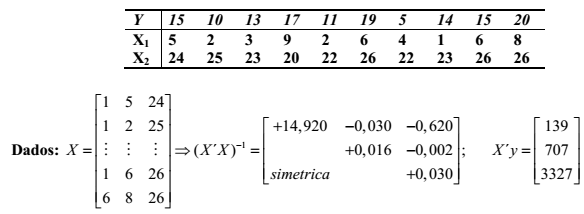
Com relação aos coeficientes de um modelo do tipo Y = β0 + β1X1 + β2X2 + ε é correto afirmar que
I. a soma β0 + β1 + β2 é aproximadamente -7.
II. o produto β0.β1.β2 aproximadamente -6,6.
III. β0 <0, β1 > 0 e β2 >0.
IV. β0 > β1 e β2 < β1.
 e
e  unitários tais que o ângulo entre quaisquer dois deles é 60º . Então o módulo de
unitários tais que o ângulo entre quaisquer dois deles é 60º . Então o módulo de  vale:
vale:( ) Existe b uma base do ¡ ³ de autovetores de T .
( ) T possui um autoespaço de dimensão 2.
( ) O polinômio mínimo de T é dado por m(x) = (x + 2)²
( ) Em relação à base a , T é um operador diagonalizável.
Considere V um espaço vetorial de dimensão finita n e F : V F : V ® V ® um operador linear tal que Fk = 0 e Fk-1 ¹ 0 para algum número natural k tal que 0 < k £ n . Analise as afirmativas abaixo e, a seguir, assinale a alternativa correta.
I. Se I : V ® V o operador identidade e 0¹ a Î ¡ então F - aI é inversível.
II. O núcleo do operador F tem mais de um elemento.
III. Se p(x) é o polinômio característico de F , então p(x) = (-1)n xn.
 uma base do espaço vetorial ¡³. Seja ƒ : ¡³ ® ¡4 uma transformação linear tal que ƒ(a) = (1,0,1,0) , ƒ(b) = (0,1,-1,0) e ƒ(c) = (1,-1,1,-1) . Então a imagem do vetor (3,-4,2) por ƒ é:
uma base do espaço vetorial ¡³. Seja ƒ : ¡³ ® ¡4 uma transformação linear tal que ƒ(a) = (1,0,1,0) , ƒ(b) = (0,1,-1,0) e ƒ(c) = (1,-1,1,-1) . Então a imagem do vetor (3,-4,2) por ƒ é: