Questões de Concurso
Sobre acionamentos e controles elétricos em engenharia elétrica
Foram encontradas 1.057 questões

Para programar o ESP32 usando a IDE Arduino, é necessário inicialmente alterar ou preencher o seguinte campo desta janela:
Sobre Modelagem da rede elétrica e da carga, particularmente com carga de potência constante à tensão (Monofásico), analise as afirmativas abaixo e dê valores Verdadeiro (V) ou Falso (F).
( ) Nos motores elétricos de indução a potência elétrica ativa absorvida pelo motor deve, obrigatoriamente, ser igual à potência mecânica exigida pela carga aplicada em seu eixo acrescida das perdas, elétricas e mecânicas.
( ) Enquanto o motor continuar funcionando, a potência elétrica ativa que ele absorve deve ser variável e independente do valor da corrente.
( ) Para cargas trifásicas equilibradas o equacionamento é oposto, onde as grandezas envolvidas em unidade diferem de forma significativa em relação à potência absorvida.
Assinale a alternativa que apresenta a sequência correta de cima para baixo.
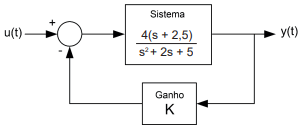
Um engenheiro deseja modificar o comportamento dinâmico de um sistema, a partir da realimentação negativa da saída com ganho K > 0, conforme apresentado na Figura acima.
Qual deverá ser o valor do ganho K a ser ajustado, para que os polos de malha fechada sejam reais e iguais?
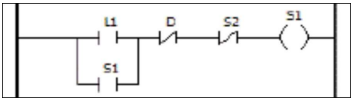
A função lógica correspondente ao diagrama é dada por:
Considere o redutor movido por motor elétrico da Figura abaixo.
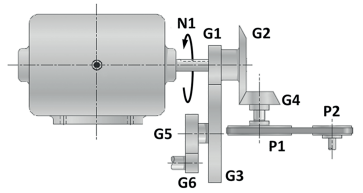
Nesse redutor,
• A velocidade angular N1 do motor elétrico é igual a 1.400 rpm;
• P1 e P2 são polias vinculadas entre si por meio de uma correia trapezoidal com raios medindo, respectivamente, 280mm e 140mm;
• G1, G3, G5 e G6 são engrenagens cilíndricas de dentes retos, enquanto G2 e G4 são engrenagens cônicas de dentes retos. A quantidade de dentes de cada engrenagem está listada no quadro abaixo.

A partir dessas informações, as velocidades angulares da polia P2 e da engrenagem G6, em rpm são, respectivamente,
A partir dos pares de tensão e corrente apresentados, é correto concluir que
O diagrama da figura a seguir apresenta o ciclo Rankine.
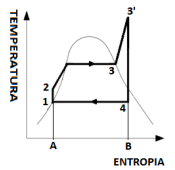
A respeito desse ciclo, é correto afirmar que
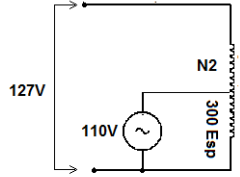
Devido à mudança de São Paulo para a cidade de Porto Alegre, um morador necessitou ligar um equipamento de 110V em uma rede 127V. Para tanto, solicitou o projeto de um autotransformador que fornecesse a tensão adequada de 127V. Com base no transformador abaixo e sabendo que a compensação de queda de tensão pode ser feita aplicando uma compensação de 4% nas espiras, determine o número de espiras totais do autotransformador.
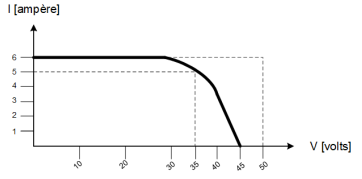
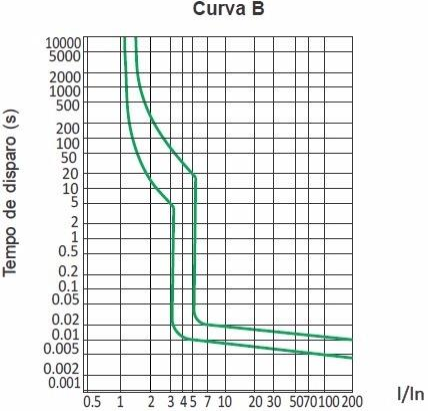
Observe o gráfico abaixo, que apresenta o comportamento de disparo de um disjuntor termomagnético acionando cargas resistivas. Considere que o disjuntor foi projetado para atender uma corrente nominal de 15 A. Para uma corrente de sobrecarga de 30 A, determine o tempo de atuação do disjuntor.
Considere uma linha de transmissão média, que utiliza modelo π nominal, conforme a figura a seguir.
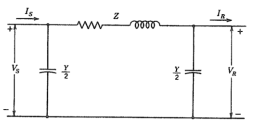
(Extraído de: William D. Stevenson, “Elementos de Análise de Sistemas de Potência”, 2ª Ed, McGraw-Hill, 1986.)
Tal linha é representada pela formulação de quadripolo dada a seguir:
VS = 0,8VR + j200IR
IS = j0,0018VR + 0,8IR
Nessas condições, o valor da admitância shunt Y é, em S,
Na figura a seguir, tem-se a representação de um sistema do tipo
máquina versus barra infinita, onde xt2 é a reatância de
transferência entre a barra terminal do gerador (Barra t) e a
barra infinita (Barra 2), x'd é a reatância transitória de eixo direto
da máquina,  é o fasor tensão interna da máquina, δ é o ângulo
de carga da máquina,
é o fasor tensão interna da máquina, δ é o ângulo
de carga da máquina,  é o fasor tensão da barra infinita, H é a
constante de inércia da máquina, Pelétrico é a potência elétrica da
máquina e Pmec é a potência mecânica da máquina.
é o fasor tensão da barra infinita, H é a
constante de inércia da máquina, Pelétrico é a potência elétrica da
máquina e Pmec é a potência mecânica da máquina.
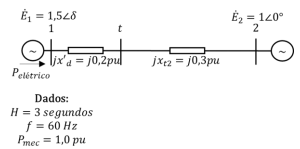
A equação de oscilação da máquina para a condição apresentada
é dada por