Questões de Concurso
Sobre acionamentos e controles elétricos em engenharia elétrica
Foram encontradas 1.057 questões
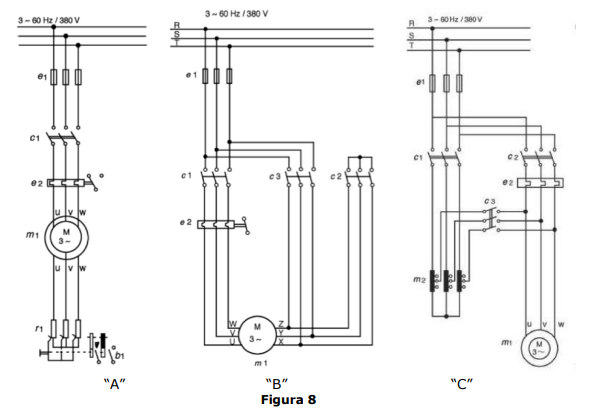
Coluna 1 1. Estrela-triângulo. 2. Rotor de anéis. 3. Autotransformador. 4. Acoplamento de Indução.
Coluna 2 ( ) Diagrama “A”. ( ) Diagrama “B”. ( ) Diagrama “C”.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
Um motor de indução monofásico, de fase dividida, que opera a 220 V, com frequência elétrica de 60 Hz, possui potência nominal de 162 kW, quatro polos, está ligado em estrela, e tem um escorregamento de plena carga de 10%.
Considerando que π = 3, assinale a opção correta.
I. Motores universais possuem a estrutura construtiva de motores de corrente contínua com enrolamentos ligados em série, podendo operar tanto em corrente alternada quanto em corrente contínua.
II. O motor universal prático necessita ser construído com estator e rotor laminados para minimizar as perdas por correntes de Foucault.
III. Quando opera em corrente alternada, o faiscamento produzido nas escovas do motor universal diminui a vida útil do comutador e pode ser fonte de interferência por radiofrequência no ambiente próximo.
IV. Uma maneira eficiente de controlar a velocidade do motor universal é controlar a tensão aplicada ao enrolamento de campo.
I. Em regime permanente, a velocidade do rotor dependerá da carga conectada ao eixo, diminuindo a velocidade com o aumento da carga.
II. As velocidades do campo girante e do rotor podem ser alteradas modificando-se a frequência das tensões aplicadas ao estator.
III. Quando utilizado, o enrolamento amortecedor diminui as oscilações transitórias de velocidade no rotor, além de atuar como gaiola de esquilo, possibilitando a partida do motor.
IV. Motores subexcitados são utilizados como compensadores síncronos, fornecendo reativo à planta onde estão conectados enquanto realizam trabalho.
I. Cada motor deve estar provido de proteção individual contra sobrecargas.
II. A proteção não deve atuar para qualquer condição de carga normal do circuito.
III. A corrente nominal do fusível do agrupamento de motores deve suportar o somatório da maior corrente de partida entre os motores e das correntes nominais dos demais motores.
IV. Motores abaixo de 30 cv não precisam de proteção individual contra sobrecargas.
Sobre os motores de indução monofásicos de polo ranhurado, analise as seguintes afirmativas e assinale a alternativa correta.
I. As correntes induzidas na bobina de arraste fazem com que o fluxo presente na porção sombreada do polo atrase-se em relação ao fluxo da porção não sombreada. O resultado dessa interação é similar a um campo girante que se move da porção não sombreada para a porção sombreada; correntes são induzidas no rotor e um alto conjugado de partida é produzido.
II. A simplicidade construtiva, o baixo custo, o alto fator de potência e o alto conjugado de partida são as principais vantagens dos motores de indução monofásicos de polo ranhurado.
III. O rotor gaiola de esquilo, que é amplamente empregado em outros tipos de motores de indução monofásicos, também é utilizado em motores de indução monofásicos de polo ranhurado.
IV. Ainda que seja considerada uma máquina rotativa de potência fracionária, os motores de indução
monofásicos de polo ranhurado não são produzidos com potência nominal inferior a 100 W, o que
se deve a sua alta eficiência. A faixa de potência de até 100 W é atendida exclusivamente por
motores universais.
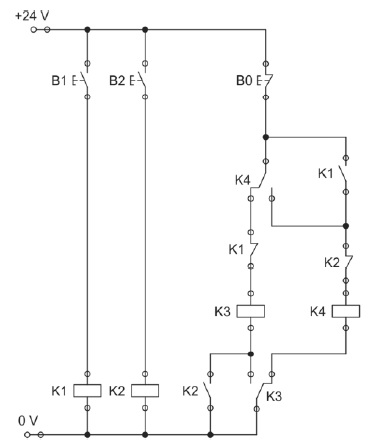 Considere:
Considere:B0 = botão de impulso contato fechado B1 e B2 = botão de impulso contato aberto K1 e K2 = contatores auxiliares K3 e K4 = contatores de potência
Corresponde ao funcionamento correto do circuito de comando representado:
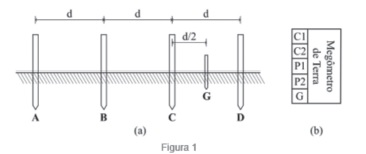
Considerando a sequência de terminais C1, C2, P1, P2, G, a ordem na qual os eletrodos devem ser ligados é:
Acerca dos protocolos de comunicação utilizados em automação industrial, julgue o seguinte item.
O protocolo Modbus permite a transferência de dados entre
dispositivos e funciona com servomotores.
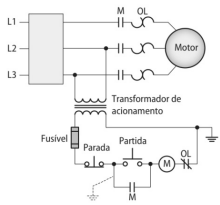
Julgue o seguinte item, relativos a acionamentos e controles elétricos.
A partir do projeto de motor elétrico apresentado na figura a seguir, é correto afirmar que uma falha à terra no circuito não causará o acionamento do motor.