Questões de Concurso
Sobre automação industrial para engenharia de automação em engenharia de automação
Foram encontradas 160 questões
O Consórcio de engenheria de automação André Pinto Rebouças está implementando uma rede industrial de baixo custo e fácil instalação. Durante a análise das opções disponíveis, a topologia escolhida foi a rede __________, desenvolvida na década de 1990 por um consórcio de empresas formado por Festo, Baumer, IFM Electronic, Pepperl+Fuchs, entre outras, sob a liderança da Siemens. Esse consórcio buscava uma alternativa de rede simples, robusta e de baixo custo, destinada à interligação de sensores e atuadores discretos, localizados na base da pirâmide de automação industrial. Esse sistema é classificado como um Sensorbus, oferecendo diversas vantagens, como facilidade de instalação, redução de cabeamento e alta confiabilidade. Além disso, é baseado em tecnologia digital e otimizado para dispositivos binários, permitindo a integração de sensores e atuadores convencionais de forma simples e eficiente, resultando em uma solução com elevada flexibilidade e funcionalidade.
Assinale a alternativa que completa corretamente a lacuna no texto:
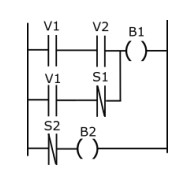
A lógica desejada requer que o motor deve ser acionado quando o botão de partida (START) for pressionado e o botão de parada (STOP) não estiver acionado. Além disso, o motor deve permanecer ligado (auto-retenção) até que o botão STOP seja pressionado.
Assinale a opção que apresenta corretamente essa lógica, em conformidade com os princípios da programação.
( ) Se um encoder possui um disco com 300 estrias, então a leitura de um pulso proveniente desse disco corresponde a um intervalo angular de 1º.
( ) Se f for calculado como 7,2 kHz e um encoder possui PPR = 360, então o valor absoluto da velocidade angular do disco é de 1200 RPM.
( ) Após sincronização, a quantidade de pulsos oriundos de um encoder contados por um CLP foi de 72. Se PPR = 720, o valor absoluto do intervalo angular estimado é de 60º.
( ) Nos encoders incrementais angulares ópticos, a defasagem de 90º entre os pulsos do encoder serve para identificar a posição angular absoluta.
( ) Ainda que a alimentação do encoder incremental seja interrompida, é possível identificar a informação de posição angular original após o restabelecimento da alimentação.
• encoder #1: fornece pulsos elétricos proporcionais ao deslocamento do eixo e necessita de procedimento de referência (homing) sempre que o sistema é energizado;
• encoder #2: fornece diretamente a posição angular codificada em cada instante, mantendo a informação de posição mesmo após desligamento do sistema.
Considerando a classificação dos dois encoders encontrados pelo engenheiro, quanto ao modo de determinação da posição, assinale a alternativa correta.
A figura a seguir apresenta elementos que são utilizados frequentemente em sistemas de automação industrial.
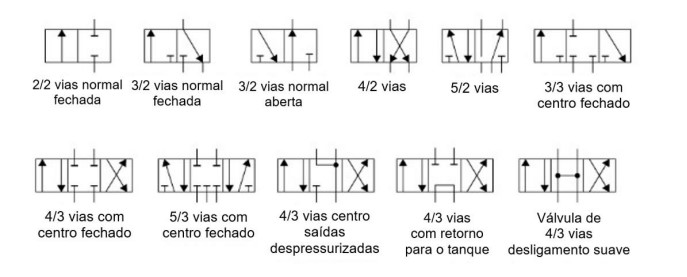
Acerca desses elementos, assinale a alternativa correta.
Com base nessas informações, assinale a alternativa que descreve a operação do sistema.
Com relação à automação industrial, julgue o item subsecutivo.
O protocolo CANBus tem alta taxa de transferência em tempo real.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
A linguagem Ladder permite a construção de circuitos utilizando-se fluxo reverso de corrente elétrica, com o mesmo esquemático do circuito elétrico que se pretende representar.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
Uma das dificuldades da utilização de um CLP é a impossibilidade de se realizar um temporizador para controlar a comutação de um contator.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
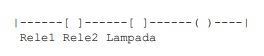
Em Ladder, para que uma lâmpada seja acesa quando um ou outro relé esteja acionado, o seguinte programa deve ser gravado em um CLP.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
Na linguagem Ladder, o processador executa programas de vários degraus da direita para a esquerda e de baixo para cima.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
A linguagem Ladder baseia-se na lógica de relés e de contatos elétricos para o projeto e a implementação de circuitos elétricos de acionamentos.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
Ladder e lista de instruções são linguagens de programação gráficas.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
Em um diagrama Ladder, a linha da esquerda representa um barramento terra, enquanto a linha da direita representa um barramento energizado.