Questões de Concurso
Sobre automação industrial para engenharia de automação em engenharia de automação
Foram encontradas 163 questões
Ano: 2026
Banca:
CESPE / CEBRASPE
Órgão:
ANSA
Prova:
CESPE / CEBRASPE - 2026 - ANSA - Ênfase 18: Manutenção – Elétrica |
Q4083380
Engenharia de Automação
Acerca de conhecimentos relacionados a eletrônica analógica, eletrônica digital e automação industrial, julgue o item a seguir.
Um controlador lógico programável, em um sistema industrial, pode integrar redes de comunicação de dados informatizados.
Ano: 2026
Banca:
IDCAP
Órgão:
UEFS
Prova:
IDCAP - 2026 - UEFS - Analista Universitário - Engenharia de Controle e Automação |
Q4058712
Engenharia de Automação
O estudo da robótica industrial envolve a análise
geométrica e física dos manipuladores para a realização
de tarefas complexas de manufatura no espaço
tridimensional. A cinemática inversa é um dos problemas
fundamentais na programação de trajetórias de robôs.
Assinale a alternativa correta.
Ano: 2026
Banca:
IDCAP
Órgão:
UEFS
Prova:
IDCAP - 2026 - UEFS - Analista Universitário - Engenharia Elétrica |
Q4057088
Engenharia de Automação
Uma nova planta de celulose está implementando seu
sistema de automação integrado. A equipe de
engenharia precisa definir claramente as funções de
cada elemento da arquitetura para especificar
corretamente os equipamentos e sistemas.Complete as
lacunas da Coluna 2 com os números correspondentes
aos elementos da Coluna 1:
Coluna 1 - Elementos do Sistema:
1.CLP (Controlador Lógico Programável).
2.IHM (Interface Homem-Máquina).
3.SCADA (Supervisory Control and Data Acquisition).
4.Rede Industrial (Fieldbus/Industrial Ethernet).
Coluna 2 - Funções Principais:
(__)Transporta dados entre dispositivos de campo, controladores e sistemas supervisórios através de protocolos padronizados.
(__)Executa lógica de controle em tempo real, processando entradas e acionando saídas em ciclos de scan determinísticos.
(__)Realiza supervisão centralizada, gerenciamento de alarmes, registro histórico de dados e geração de relatórios.
(__)Proporciona interface local para operação e visualização, permitindo interação direta do operador com a máquina ou processo.
A sequência correta de preenchimento das lacunas é:
Coluna 1 - Elementos do Sistema:
1.CLP (Controlador Lógico Programável).
2.IHM (Interface Homem-Máquina).
3.SCADA (Supervisory Control and Data Acquisition).
4.Rede Industrial (Fieldbus/Industrial Ethernet).
Coluna 2 - Funções Principais:
(__)Transporta dados entre dispositivos de campo, controladores e sistemas supervisórios através de protocolos padronizados.
(__)Executa lógica de controle em tempo real, processando entradas e acionando saídas em ciclos de scan determinísticos.
(__)Realiza supervisão centralizada, gerenciamento de alarmes, registro histórico de dados e geração de relatórios.
(__)Proporciona interface local para operação e visualização, permitindo interação direta do operador com a máquina ou processo.
A sequência correta de preenchimento das lacunas é:
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027624
Engenharia de Automação
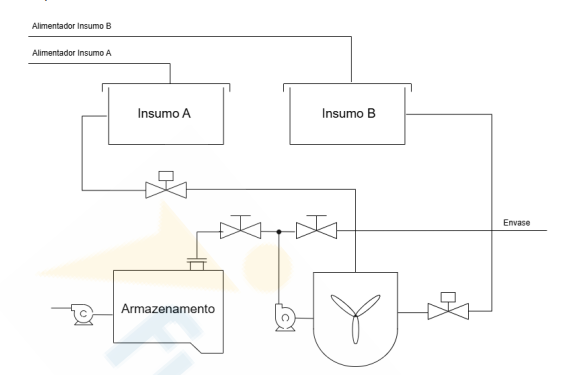
No projeto de automação industrial, o diagrama PFD/P&ID da figura abaixo mostra
uma linha de produção. Com base na figura, qual alternativa identifica corretamente os principais
símbolos e sequência funcional?
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027615
Engenharia de Automação
Em sistemas de automação, a comunicação CLP-IHM usa protocolos como
Modbus/Profinet para troca de variáveis, afetada por varredura, tráfego e polling. Sendo assim, analise
as assertivas abaixo e assinale V, se verdadeiras, ou F, se falsas.
( ) Protocolo influencia velocidade de atualização das telas por encapsulamento e eficiência de transmissão.
( ) Redes congestionadas causam atraso em leitura/escrita de variáveis com excesso de tags/polling.
( ) Comunicação CLP-IHM é desnecessária; IHM supervisiona sem acesso às variáveis do CLP.
( ) Taxa de atualização da IHM causa defasagem visual, mesmo com CLP executando corretamente.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
( ) Protocolo influencia velocidade de atualização das telas por encapsulamento e eficiência de transmissão.
( ) Redes congestionadas causam atraso em leitura/escrita de variáveis com excesso de tags/polling.
( ) Comunicação CLP-IHM é desnecessária; IHM supervisiona sem acesso às variáveis do CLP.
( ) Taxa de atualização da IHM causa defasagem visual, mesmo com CLP executando corretamente.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027607
Engenharia de Automação
Em sistemas SCADA, dispositivos RTU/PLC coletam dados de campo via protocolos
como Modbus ou OPC UA, enviando para servidores centrais que geram IHM (Interface
Homem-Máquina) com synópticos, historiadores de tendências e alarmes priorizados. Para
monitoramento eficaz, distinguem variáveis digitais (discretas, ex.: status de válvula) de analógicas
(contínuas, ex.: vazão). Qual alternativa descreve corretamente sua integração em SCADA?
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027606
Engenharia de Automação
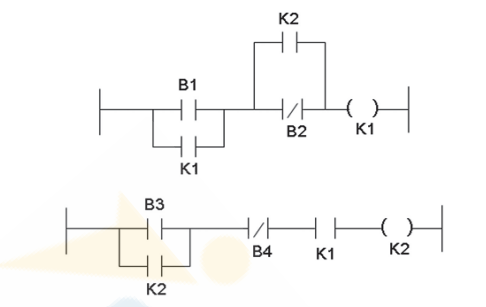
Analise o diagrama Ladder para controle sequencial de dois motores (M1 via bobina
K1, M2 via K2), com botoeiras B1 (liga M1), B3 (liga M2), B2 (para M1), B4 (para M2) abaixo e defina
a sequência obrigatória para ligar M1 e depois M2.
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027601
Engenharia de Automação
Durante a configuração de uma bancada de automação com Controlador Lógico
Programável (CLP), módulo de entradas analógicas e Interface Homem-Máquina (IHM), um técnico
precisa validar algumas afirmações feitas por alunos durante a aula prática. Com base nos conceitos
de arquitetura de CLPs e integração com IHM, analise a sentença abaixo:
Em módulos de entrada analógica de CLPs, sinais contínuos como 0–10 V ou 4–20 mA são convertidos por um conversor A/D em valores numéricos que o processador passa a tratar internamente, muitas vezes em faixas inteiras como 0 a 32767, dependendo da resolução e do fabricante (1ª parte). A IHM pode trocar dados com o CLP por meio de protocolos de comunicação industrial, permitindo ler e também escrever variáveis de memória, desde que isso esteja previsto na configuração do sistema e nas permissões definidas no projeto (2ª parte). O endereçamento de entradas e saídas em CLPs segue um padrão fixo e universal entre fabricantes, de modo que a mesma convenção de memória e notação pode ser aplicada indistintamente a qualquer marca (3ª parte).
Quais partes estão corretas?
Em módulos de entrada analógica de CLPs, sinais contínuos como 0–10 V ou 4–20 mA são convertidos por um conversor A/D em valores numéricos que o processador passa a tratar internamente, muitas vezes em faixas inteiras como 0 a 32767, dependendo da resolução e do fabricante (1ª parte). A IHM pode trocar dados com o CLP por meio de protocolos de comunicação industrial, permitindo ler e também escrever variáveis de memória, desde que isso esteja previsto na configuração do sistema e nas permissões definidas no projeto (2ª parte). O endereçamento de entradas e saídas em CLPs segue um padrão fixo e universal entre fabricantes, de modo que a mesma convenção de memória e notação pode ser aplicada indistintamente a qualquer marca (3ª parte).
Quais partes estão corretas?
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027595
Engenharia de Automação
Uma indústria de bebidas está automatizando sua linha de envase e precisa
implementar um sistema de contagem de garrafas de vidro incolor em uma esteira de alta velocidade.
O sensor deve ser capaz de detectar a presença do recipiente sem contato físico, sendo robusto à
transparência do material e capaz de altas taxas de comutação. Considerando as propriedades físicas
do vidro e as tecnologias de sensoriamento, qual dispositivo é o mais indicado?
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027593
Engenharia de Automação
Em uma bancada de treinamento de comandos lógicos programáveis, um sistema de
sinalização foi programado para simular duas condições comuns da indústria:
• Uma sirene que deve ser acionada somente após um atraso programado, evitando partidas imediatas.
• Um ventilador que deve continuar operando por alguns segundos após o desligamento do comando, para garantir a exaustão residual do ambiente.
Ao revisar o programa em Ladder, foi necessário distinguir o comportamento dos temporizadores empregados nessas duas etapas. Nesse caso, qual alternativa descreve corretamente a diferença principal entre um temporizador TON e um TOF?
• Uma sirene que deve ser acionada somente após um atraso programado, evitando partidas imediatas.
• Um ventilador que deve continuar operando por alguns segundos após o desligamento do comando, para garantir a exaustão residual do ambiente.
Ao revisar o programa em Ladder, foi necessário distinguir o comportamento dos temporizadores empregados nessas duas etapas. Nesse caso, qual alternativa descreve corretamente a diferença principal entre um temporizador TON e um TOF?
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro de Controle e Automação |
Q3974485
Engenharia de Automação
As Redes de Petri são usadas para modelar sistemas cujo
comportamento é regido por eventos discretos, como filas,
protocolos de comunicação, sistemas de manufatura ou controle
de processos digitais. Elas permitem analisar concorrência,
sincronização e condições de conflito de eventos. Assim sendo,
pode-se afirmar que as redes de Petri são adequadas para
modelar:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro de Controle e Automação |
Q3974474
Engenharia de Automação
No âmbito da automação industrial, o GRAFCET é uma
ferramenta gráfica que auxilia na descrição e no planejamento de
processos sequenciais automatizados. Assim sendo, GRAFCET é
utilizado para:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro de Controle e Automação |
Q3974473
Engenharia de Automação
No contexto de automação industrial, o Controlador Lógico
Programável (CLP) é amplamente utilizado para controlar
processos e equipamentos de forma confiável e flexível. Uma das
principais vantagens do CLP é:
Q3852268
Engenharia de Automação
Numa condição-transição de um dado GRAFCET encontra-se a
expressão “3s/a/7s” em que a é uma variável booleana.
Se a variável a for verdadeira por 12s seguidos e falsa, caso contrário, a duração total na qual a expressão “3s/a/7s” será verdadeira, em segundos, será
Se a variável a for verdadeira por 12s seguidos e falsa, caso contrário, a duração total na qual a expressão “3s/a/7s” será verdadeira, em segundos, será
Q3852242
Engenharia de Automação
A respeito da pirâmide de automação, conforme definida pela
norma ISA 95, analise os itens a seguir:
I. A pirâmide de automação possui 5 níveis, sendo o mais baixo o nível de processo e o mais alto o nível de gerenciamento corporativo.
II. Uma Interface Homem Máquina (IHM) é um dispositivo do nível de gerenciamento de planta.
III. Um Controlador Lógico Programável (CLP) é um dispositivo do nível de controle de processo.
É correto o que se apresenta em
I. A pirâmide de automação possui 5 níveis, sendo o mais baixo o nível de processo e o mais alto o nível de gerenciamento corporativo.
II. Uma Interface Homem Máquina (IHM) é um dispositivo do nível de gerenciamento de planta.
III. Um Controlador Lógico Programável (CLP) é um dispositivo do nível de controle de processo.
É correto o que se apresenta em
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
UFABC
Prova:
INSTITUTO AOCP - 2025 - UFABC - Técnico de Laboratório - Área: Mecatrônica |
Q4093958
Engenharia de Automação
A equipe técnica está acompanhando a
modernização de uma planta industrial em que o
sistema de automação deverá integrar, em tempo
real, os dados de produção dos controladores
lógicos programáveis (CLPs) com os sistemas
corporativos de gestão industrial (ERP/MES) e com
aplicações de análise em nuvem. Os engenheiros
decidiram adotar um protocolo de comunicação
padronizado que oferece interoperabilidade entre
diferentes fabricantes, segurança de dados por
criptografia e modelagem de informações
independente de plataforma. Nesse contexto, o
protocolo mais adequado para essa integração é
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
UFABC
Prova:
INSTITUTO AOCP - 2025 - UFABC - Técnico de Laboratório - Área: Mecatrônica |
Q4093957
Engenharia de Automação
Em um painel automatizado, foram identificados
dois controladores lógicos programáveis (CLPs)
configurados em modo de operação redundante.
Para que essa configuração funcione
corretamente, é necessário que os controladores
estejam conectados na mesma rede e entre si. A
comunicação entre os CLPs redundantes é
realizada por meio de um módulo denominado
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
UFABC
Prova:
INSTITUTO AOCP - 2025 - UFABC - Técnico de Laboratório - Área: Mecatrônica |
Q4093947
Engenharia de Automação
A característica de retroalimentação em um
manipulador robótico reflete diretamente no seu
sistema de controle no qual possui uma atuação
que pode ser descrita como
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
UFABC
Prova:
INSTITUTO AOCP - 2025 - UFABC - Técnico de Laboratório - Área: Eletrotécnica |
Q4093934
Engenharia de Automação
Durante a integração de um sistema supervisório a
uma linha automatizada no laboratório de controle
e automação, o técnico responsável da UFABC
precisa configurar a comunicação entre
controladores lógicos programáveis (CLPs),
sensores inteligentes e o computador central.
Considerando os conceitos de protocolos de
comunicação, arquitetura de redes e redes
industriais, assinale a alternativa correta.
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
SANESUL
Prova:
INSTITUTO AOCP - 2025 - SANESUL - Técnico em Automação |
Q3539196
Engenharia de Automação
Em um sistema de controle de abastecimento de
reservatório, um transmissor de nível envia um
sinal do tipo “BOOL” para a entrada do cartão de
um Controlador Lógico Programável (CLP).
Assinale a alternativa que apresenta a principal
função desse sinal BOOL no controle do
reservatório.