Foram encontradas 726 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
I. A realimentação negativa reduz a distorção harmônica.
II. Um amplificador diferencial é o estágio de saída típico de um amplificador operacional.
III. O amplificador de instrumentação com amplificador operacional possui um amplificador somador no estágio de saída.
IV. O amplificador somador tem duas ou mais entradas, com cada entrada amplificada pelo seu ganho de canal e uma única saída contendo a soma das entradas amplificadas.
São verdadeiras as afirmativas
A expressão booleana obtida da tabela da verdade abaixo é:

Considere o circuito lógico mostrado na figura a seguir.
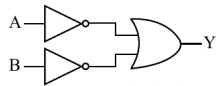
Com base na figura acima, assinale a alternativa que corresponde à expressão Booleana do circuito.
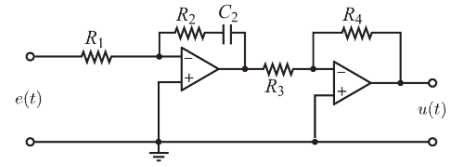
Sabendo que a função de transferência do circuito é dada por
 , assinale a
alternativa que apresenta a relação correta entre os elementos de circuito e os ganhos Proporcional ( kp)
e Integral ( ki):
, assinale a
alternativa que apresenta a relação correta entre os elementos de circuito e os ganhos Proporcional ( kp)
e Integral ( ki): 
Com base nesse diagrama, é correto afirmar:
Com base nesse diagrama, é correto afirmar:
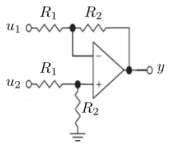
Observe o diagrama a seguir.

Em relação ao diagrama de circuito mostrado acima, em que u é a tensão de entrada e y a de saída, assinale V (verdadeiro) ou F (falso) nas afirmativas seguintes.
(__) Se a relação entre os resistores for R2 > R1, o sinal de entrada é amplificado na saída.
(__) A configuração é de circuito tipo inversor.
(__) O ganho desse sistema é - R2 / R1.
A sequência correta é
(__) No controle de processos distribuídos, é possível realizar ajuste nos set points (referências) dos controladores, mesmo à distância.
(__) É possível a realização segura do controle remoto embarcado no SCADA e em malha fechada via redes, de variáveis diversas, como, por exemplo, a temperatura e a pressão de caldeiras.
(__) Podem operar a milhares de quilômetros de distância.
(__) Sua constituição mínima exige um console para o operador e um braço robótico manipulador.
A sequência correta é
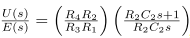
(__) Sensores proveem informações dos processos automatizados e do ambiente ao redor deles, convertendo informação física, como pressão, temperatura, nível, em sinais elétricos.
(__) Sistemas de condicionamento de sinais convertem sinais de entrada e saída dos processos para níveis adequados de utilização, executando funções de amplificação ou atenuação, filtragem, conversão analógica-digital e digital-analógica.
(__) Atuadores convertem os dados medidos na saída do processo controlado em ação física, como: válvulas, sistemas de bombeamento, sistemas de frenagem, servomotores.
(__) Controladores tomam as decisões de correção e atuação com base nos seus sinais de entrada provenientes dos sinais dos sensores e das referências.
A sequência correta é
(__) É como um computador pessoal, PC, podendo-se usar sistema operacional baseado em Windows ou Linux, como o Ubuntu.
(__) É equipado com interfaces de entrada e saída especiais para a conexão de sensores e atuadores industriais.
(__) Por ser um dispositivo digital, não é capaz de processar sinais analógicos.
(__) Para controlar processos industriais, o CLP requer um grande número de relés para a realização de comparações e análises lógicas.
(__) Os programas ou softwares de controle gravados em um CLP devem ser regravados no caso de o dispositivo ter permanecido desligado por vários dias.
A sequência correta é
Observe a seguinte equação.

Para o sistema dinâmico mostrado na equação acima, assinale a alternativa que representa uma
realização de estado válida para quando o vetor de estado é definido como: 

A função de transferência correta é

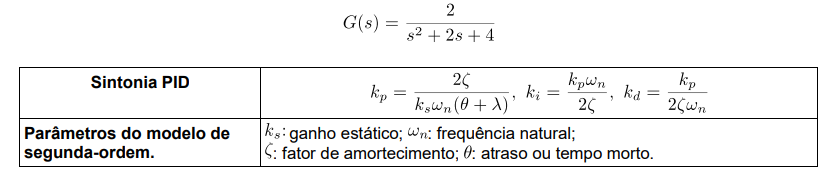
Os ganhos kp, ki, kd, que sintonizam esse controlador PID são:
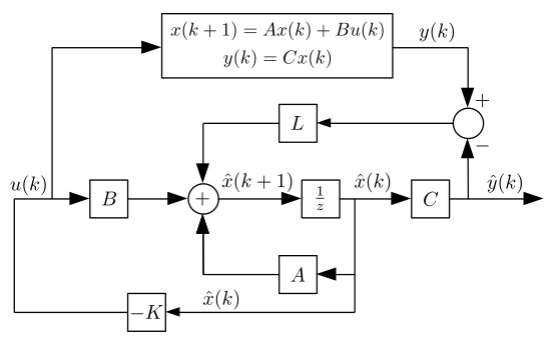
Em relação ao diagrama, assinale V (verdadeiro) ou F (falso) nas alternativas seguintes.
(__) A dinâmica de malha fechada pode ser descrita por x (k +1) = Ax (k) - BK x̂ (k).
(__) O estimador de estado é descrito por x̂ (k) = (A - LC) x̂ (k - 1) + Bu (k - 1).
(__) Os autovalores da matriz A devem estar contidos no círculo unitário do plano z.
A sequência correta é

Com base no diagrama da figura, a margem de ganho e a margem de fase são, respectivamente: