Questões de Concurso Sobre engenharia eletrônica
Foram encontradas 4.397 questões
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Técnico de Laboratório - Área: Eletromecânica |
Q2227601
Engenharia Eletrônica
Os diodos são componentes eletrônicos amplamente utilizados em circuitos
eletrônicos. Sobre as características desse componente, analise as seguintes assertivas:
I. Em um diodo real, quando a diferença de tensão entre ânodo e cátodo é positiva, o diodo apresenta apenas o comportamento de condução.
II. Diferentemente do diodo real, o diodo ideal não apresenta um limite de tensão de ruptura, conhecida como tensão reversa máxima.
III. O diodo pode ser utilizado como um retificador simples, que converte uma tensão alternada em uma tensão contínua constante.
Quais estão corretas?
I. Em um diodo real, quando a diferença de tensão entre ânodo e cátodo é positiva, o diodo apresenta apenas o comportamento de condução.
II. Diferentemente do diodo real, o diodo ideal não apresenta um limite de tensão de ruptura, conhecida como tensão reversa máxima.
III. O diodo pode ser utilizado como um retificador simples, que converte uma tensão alternada em uma tensão contínua constante.
Quais estão corretas?
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Técnico de Laboratório - Área: Eletromecânica |
Q2227600
Engenharia Eletrônica
Transistores são componentes eletrônicos que permitem o controle de uma corrente
elétrica maior a partir de uma corrente menor. Sobre esse assunto, analise as seguintes assertivas e
assinale a alternativa correta.
I. O transistor TBJ é um dispositivo unipolar, e o transistor FET é bipolar. II. O transistor TBJ pode ser utilizado como chave ou como amplificador. III. Comparando os transistores FET e TBJ, o primeiro fornece uma maior impedância de entrada.
I. O transistor TBJ é um dispositivo unipolar, e o transistor FET é bipolar. II. O transistor TBJ pode ser utilizado como chave ou como amplificador. III. Comparando os transistores FET e TBJ, o primeiro fornece uma maior impedância de entrada.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Técnico de Laboratório - Área: Automação |
Q2226756
Engenharia Eletrônica
O que são as Portarias do INMETRO?
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Técnico de Laboratório - Área: Automação |
Q2226750
Engenharia Eletrônica
Sobre uma tendência (trend) em um sistema supervisório, assinale a alternativa que
melhor o descreva.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Técnico de Laboratório - Área: Automação |
Q2226748
Engenharia Eletrônica
Sobre o método de sintonia por Ziegler-Nichols, assinale a alternativa que descreve
corretamente o comportamento do sistema.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Técnico de Laboratório - Área: Automação |
Q2226747
Engenharia Eletrônica
– O que significa o termo "variável de processo", utilizado em sistemas de controle de
processos?
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Técnico de Laboratório - Área: Automação |
Q2226746
Engenharia Eletrônica
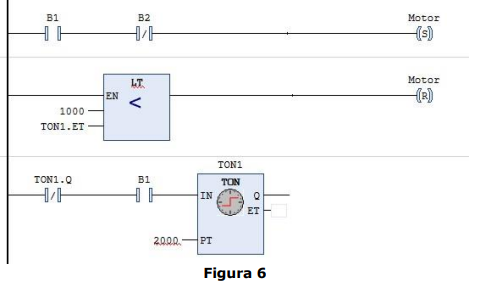
Um Projeto construído para um CLP foi programado em uma linguagem denominada
“Ladder”, como apresentado na Figura 6 abaixo. Assinale a alternativa que descreve corretamente o
comportamento do sistema.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Técnico de Laboratório - Área: Automação |
Q2226742
Engenharia Eletrônica
Os sensores fotoelétricos são elementos muito importantes para percepção e
identificação de objetos e apresentam principalmente três maneiras de detecção: por reflexão, por
barreira e difuso. Sobre esses sensores, é correto afirmar que:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Técnico de Laboratório - Área: Automação |
Q2226741
Engenharia Eletrônica
Considerando os algarismos significativos em uma soma de dois valores, os números
178,7 e 14,03, é correto afirmar que a soma desses números é:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Técnico de Laboratório - Área: Automação |
Q2226737
Engenharia Eletrônica
A norma IEC 61131-3 foi o primeiro esforço real para a padronização das linguagens
de programação para a automação industrial. Nesse esforço, foram padronizadas quatro principais
linguagens de programação de CLPs, sendo duas linguagens textuais e duas gráficas. Sobre essa
afirmação, quais são as linguagens textuais e as linguagens gráficas, respectivamente?
Ano: 2023
Banca:
CESPE / CEBRASPE
Órgão:
SERPRO
Prova:
CESPE / CEBRASPE - 2023 - SERPRO - Analista - Especialização: Tecnologia |
Q2226548
Engenharia Eletrônica
Aprendizado de máquina é um subcampo da inteligência artificial que consiste no treinamento de modelos computacionais para que possam reconhecer padrões e, a partir de um conjunto de dados de entrada, prever o valor de uma variável de saída. Em relação ao aprendizado de máquina, julgue o item a seguir.
A regressão logística utiliza variáveis independentes categóricas para prever uma variável lógica ou booliana.
A regressão logística utiliza variáveis independentes categóricas para prever uma variável lógica ou booliana.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224299
Engenharia Eletrônica
Usualmente utilizado para sistemas lineares invariantes no tempo e controláveis em sua representação por espaço de estados ẋ(t) = Ax(t) + Bu(t), o regulador linear quadrático (do inglês, Linear Quadratic Regulator) é um controlador ótimo, com base na realimentação de estados, cujos ganhos são obtidos a partir da minimização de uma função custo quadrática do tipo:
J = (xT Qx + uT Ru)dt
(xT Qx + uT Ru)dt
Onde Q é uma matriz real simétrica positiva semidefinida e R é uma matriz real simétrica positiva definida. Para uma realimentação de estados do tipo u = −Kx, a minimização da função custo quadrática acima com J = x(0)TPx(0) é obtida com P > 0, sendo a solução da equação algébrica de Ricatti: ATP + PA − PBR−1BTP + Q = 0. Assinale a alternativa que apresenta a expressão final dos ganhos do controlador, dado que a solução P foi previamente obtida para o caso descrito acima.
J =
(xT Qx + uT Ru)dt Onde Q é uma matriz real simétrica positiva semidefinida e R é uma matriz real simétrica positiva definida. Para uma realimentação de estados do tipo u = −Kx, a minimização da função custo quadrática acima com J = x(0)TPx(0) é obtida com P > 0, sendo a solução da equação algébrica de Ricatti: ATP + PA − PBR−1BTP + Q = 0. Assinale a alternativa que apresenta a expressão final dos ganhos do controlador, dado que a solução P foi previamente obtida para o caso descrito acima.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224298
Engenharia Eletrônica
Assinale a alternativa que corresponde à estratégia de controle multivariável para o
sistema MIMO com duas entradas e duas saídas mostrada na Figura 12 abaixo: 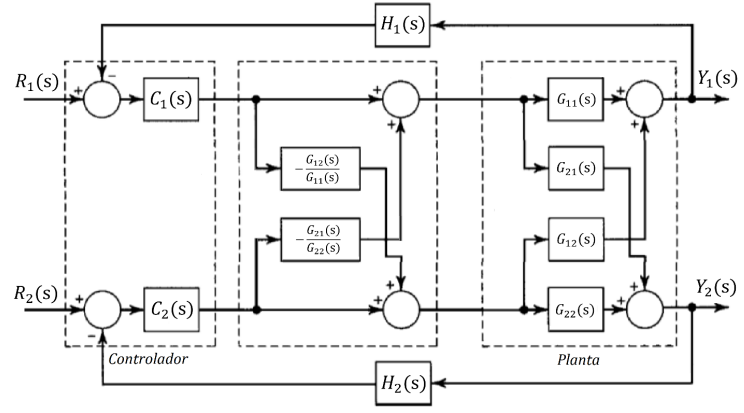
Figura 12
Figura 12
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224297
Engenharia Eletrônica
Considere o seguinte modelo em espaço de estados de um sistema linear representado na sua forma matricial:
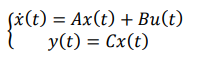 x ∈ Rn, u ∈ Rm, y ∈ Rp
x ∈ Rn, u ∈ Rm, y ∈ Rp
Sendo x o vetor de estados do sistema acima, um engenheiro propõe uma lei de controle por realimentação de estados do formato u = −K1x + K2r para que a saída y(t) siga uma referência constante r. Dado esse contexto, assinale a alternativa que representa a expressão de K2 dado queK1 é conhecido.
x ∈ Rn, u ∈ Rm, y ∈ RpSendo x o vetor de estados do sistema acima, um engenheiro propõe uma lei de controle por realimentação de estados do formato u = −K1x + K2r para que a saída y(t) siga uma referência constante r. Dado esse contexto, assinale a alternativa que representa a expressão de K2 dado queK1 é conhecido.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224296
Engenharia Eletrônica
Assinale a alternativa que corresponde às matrizes associadas à representação em
espaços de estados do sistema mostrado na Figura 11 abaixo: 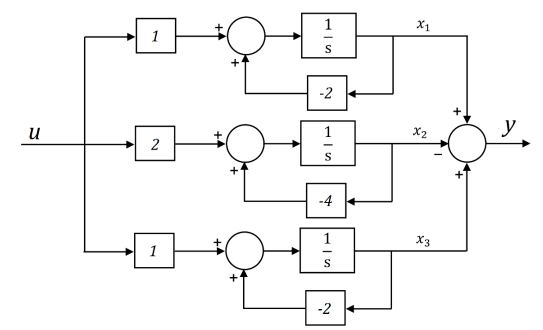
Figura 11
Figura 11
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224295
Engenharia Eletrônica
Considere um sistema linear caracterizado pela seguinte função de transferência:
Y(s) / U(s) = 2 / s3 + 6s2 + 11s + 6
Assumindo condições iniciais nulas, assinale a alternativa que corresponde às matrizes do modelo matemático do sistema em sua representação em espaço de estados.
Y(s) / U(s) = 2 / s3 + 6s2 + 11s + 6
Assumindo condições iniciais nulas, assinale a alternativa que corresponde às matrizes do modelo matemático do sistema em sua representação em espaço de estados.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224294
Engenharia Eletrônica
Considere o sistema massa-mola-amortecido (Figura 10) a seguir:
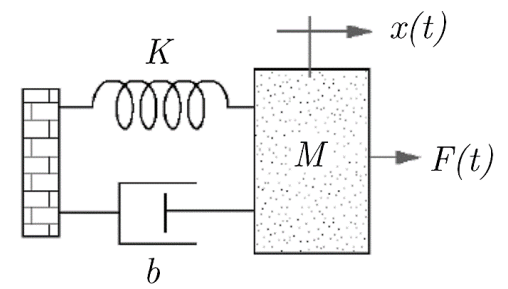
Figura 10
Os sinais de entrada e de saída do sistema são dados por F(t) e x(t), respectivamente. Além disso, definem-se as variáveis de estado como x1(t) = x(t) e x2(t) = ẋ(t). Com base nessas informações, assinale a alternativa que corresponde às matrizes do modelo matemático do sistema em sua representação em espaço de estados.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224293
Engenharia Eletrônica
Sobre projeto de controladores discretos direto e por emulação, analise as assertivas
abaixo e assinale a alternativa correta.
I. A técnica conhecida para projetar controladores diretamente no domínio do tempo discreto é conhecida como método direto como, por exemplo, o método de Tustin.
II. A técnica conhecida como emulação consiste em obter um equivalente discreto para um controlador contínuo já previamente projetado. Para isso, normalmente se utiliza o método de Euler ou o método do mapeamento de polos e zeros.
III. No projeto por emulação, a frequência de amostragem deve ser pelo menos duas vezes maior que a largura de faixa (ou largura de banda) do sistema em malha fechada a tempo contínuo de forma a atender o teorema da amostragem de Nyquist-Shannon. Caso contrário, ocorrerá o aliasing.
I. A técnica conhecida para projetar controladores diretamente no domínio do tempo discreto é conhecida como método direto como, por exemplo, o método de Tustin.
II. A técnica conhecida como emulação consiste em obter um equivalente discreto para um controlador contínuo já previamente projetado. Para isso, normalmente se utiliza o método de Euler ou o método do mapeamento de polos e zeros.
III. No projeto por emulação, a frequência de amostragem deve ser pelo menos duas vezes maior que a largura de faixa (ou largura de banda) do sistema em malha fechada a tempo contínuo de forma a atender o teorema da amostragem de Nyquist-Shannon. Caso contrário, ocorrerá o aliasing.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224292
Engenharia Eletrônica
Considere um sistema linear invariante no tempo controlável, cuja representação em
Espaço de Estados é dada por: 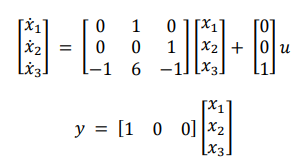
Sendo x = [x1 x2 x3] o vetor de estados do sistema acima, objetiva-se projetar um controlador por realimentação de estados (i.e, u = −Kx) de tal forma a alocar os polos do sistema em malha fechada em -1, -2 e -4. Dado esse contexto, determine o vetor de ganhos K = [K1 K2 K3] necessário para garantir esse requisito.
Sendo x = [x1 x2 x3] o vetor de estados do sistema acima, objetiva-se projetar um controlador por realimentação de estados (i.e, u = −Kx) de tal forma a alocar os polos do sistema em malha fechada em -1, -2 e -4. Dado esse contexto, determine o vetor de ganhos K = [K1 K2 K3] necessário para garantir esse requisito.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224291
Engenharia Eletrônica
Considere o sistema abaixo (Figura 8) com retroalimentação unitária:
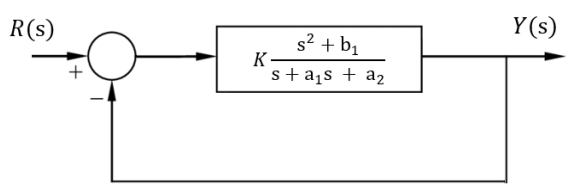
Figura 8
Dado o seu lugar das raízes mostrado na Figura 9 abaixo, assinale a alternativa correta.
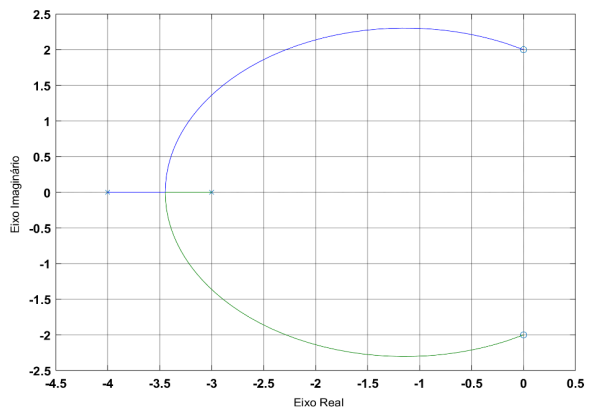
Figura 9