Questões de Concurso Público IF-PA 2022 para Professor EBTT - Engenharia Eletrônica
Foram encontradas 45 questões
Ano: 2022
Banca:
IF-PA
Órgão:
IF-PA
Prova:
IF-PA - 2022 - IF-PA - Professor EBTT - Engenharia Eletrônica |
Q3998468
Engenharia Eletrônica
Um sistema de controle em malha fechada é implementado, conforme o diagrama de blocos da figura abaixo
A lei de controle do controlador PID apresentada na equação acima, representa a realização do controlador PID na estrutura
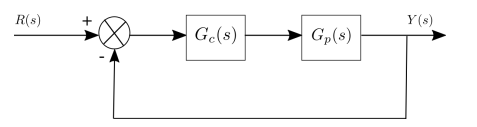
Considerando Gc(s) um controlador Proporcional, Integral, Derivativo (PID), com ganho proporcional, Kc tempo integral, T, e tempo derivativo, T, conforme equação abaixo.

Ano: 2022
Banca:
IF-PA
Órgão:
IF-PA
Prova:
IF-PA - 2022 - IF-PA - Professor EBTT - Engenharia Eletrônica |
Q3998469
Engenharia Eletrônica
O método do Lugar Geométrico das Raízes (LGR), desenvolvido por Walter R. Evans
(década de 1950), é bastante utilizado em projetos de controladores e compensadores para
diferentes tipos de sistemas de controle. Considerando o sistema de controle em malha
fechada, ilustrado pelo diagrama de blocos (Figura 1), e observando o gráfico do Lugar
Geométrico das Raízes (Figura 2), respectivamente.
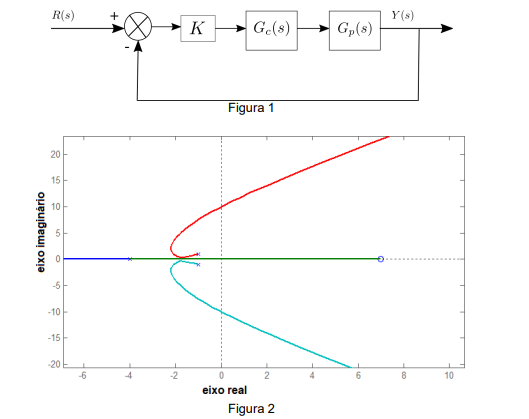
Assinale a opção em que o gráfico do LGR está associado com o sistema de malha aberta KGc(????)Gp(s)
Assinale a opção em que o gráfico do LGR está associado com o sistema de malha aberta KGc(????)Gp(s)
Ano: 2022
Banca:
IF-PA
Órgão:
IF-PA
Prova:
IF-PA - 2022 - IF-PA - Professor EBTT - Engenharia Eletrônica |
Q3998470
Engenharia Eletrônica
Um engenheiro projetista deseja implementar um sistema de controle digital para controlar
um processo térmico. O algoritmo de controle é implementado em um dispositivo
microprocessado, onde uma placa Analógica/Digital (A/D) e Digital/Analógica (D/A) faz a
interface entre o dispositivo e o processo térmico, para que a lei de controle seja aplicada
no processo e o sinal de saída do sistema seja enviado ao dispositivo microprocessado.
Considerando que o projeto do controlador utiliza o equivalente discreto, Gp(z), da planta Gp(s), qual o método apropriado para discretizar de Gp(s)?
Ano: 2022
Banca:
IF-PA
Órgão:
IF-PA
Prova:
IF-PA - 2022 - IF-PA - Professor EBTT - Engenharia Eletrônica |
Q3998471
Engenharia Eletrônica
Em uma indústria de cosmético, tem-se uma planta de nível, utilizada para fabricação de um
produto para o rosto. Utilizando-se técnicas de modelagem, chegou-se a um modelo
matemático, para a citada planta, de 1ª ordem com atraso de transporte (FOPDT – FirstOrder Plus Dead-Time), conforme a função de transferência abaixo, onde Y(s) é o nível que
se deixa controlar, U(s) é o sinal de controle enviado ao atuador da planta, Kp é o ganho
estático, real positivo, é a constante de tempo do sistema ( > 0 ) e ???????? caracteriza o atraso
de transporte.
é a constante de tempo do sistema ( > 0 ) e ???????? caracteriza o atraso
de transporte. 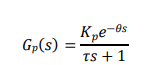
Um dos engenheiros, responsável pelos processos de chão de fábrica, deseja implementar uma malha de controle para essa planta, conforme diagrama de blocos da figura abaixo, sendo Gc(s), o controlador projetado, N é uma constante que representa o sensor de nível e R(s) o nível de referência que se deseja manter no sistema controlado.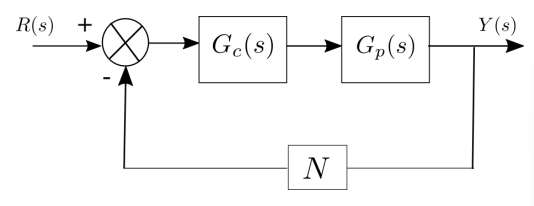
I. Na função de transferência Gp(s), se θ >> significa que o sistema é lag dominante. II. Se Gc(s) é um controlador Proporcional, Integral (PI), e R(s) é uma referência que
varia na forma de um degrau, então em regime permanente, o nível do tanque seguirá
o nível desejado da referência, com erro nulo em estado estacionário.
III. Se Gc(s) é um controlador Proporcional, com ganho estático positivo, então o nível
do tanque, não acompanhará a referência (forma degrau) em regime permanente.
IV. Se Gc(s) é um controlador Proporcional, Integral (PI), e o atraso de transporte θ for
muito pequeno, podendo ser desconsiderado, então, a função de transferência em
malha fechada terá um zero e dois polos.
é a constante de tempo do sistema ( > 0 ) e ???????? caracteriza o atraso
de transporte. Um dos engenheiros, responsável pelos processos de chão de fábrica, deseja implementar uma malha de controle para essa planta, conforme diagrama de blocos da figura abaixo, sendo Gc(s), o controlador projetado, N é uma constante que representa o sensor de nível e R(s) o nível de referência que se deseja manter no sistema controlado.
I. Na função de transferência Gp(s), se θ >>
significa que o sistema é lag dominante. II. Se Gc(s) é um controlador Proporcional, Integral (PI), e R(s) é uma referência que
varia na forma de um degrau, então em regime permanente, o nível do tanque seguirá
o nível desejado da referência, com erro nulo em estado estacionário.
III. Se Gc(s) é um controlador Proporcional, com ganho estático positivo, então o nível
do tanque, não acompanhará a referência (forma degrau) em regime permanente.
IV. Se Gc(s) é um controlador Proporcional, Integral (PI), e o atraso de transporte θ for
muito pequeno, podendo ser desconsiderado, então, a função de transferência em
malha fechada terá um zero e dois polos.
Ano: 2022
Banca:
IF-PA
Órgão:
IF-PA
Prova:
IF-PA - 2022 - IF-PA - Professor EBTT - Engenharia Eletrônica |
Q3998472
Engenharia Eletrônica
Um sistema robótico seletor de cores e um compensador/controlador estão em série em
uma malha de controle realimentada. Considerando a função de transferência do
compensador/controlador  pode-se afirmar que a compensação é do tipo:
pode-se afirmar que a compensação é do tipo:
pode-se afirmar que a compensação é do tipo: