Questões de Concurso Público IF-MG 2024 para PROFESSOR EBTT – Engenharia de Controle e Automação - Sabará
Foram encontradas 19 questões
Considere o sistema de malha fechada com o diagrama de blocos apresentado na figura abaixo.
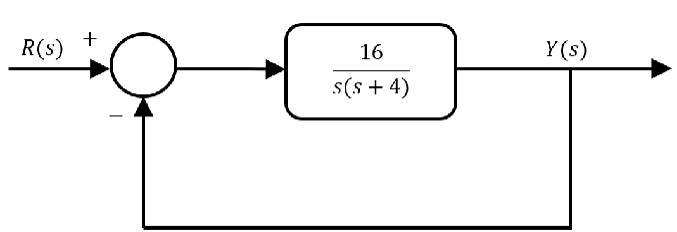
Sobre esse sistema em malha fechada, compreende-se que:
Considere o sistema de controle apresentado na figura abaixo.
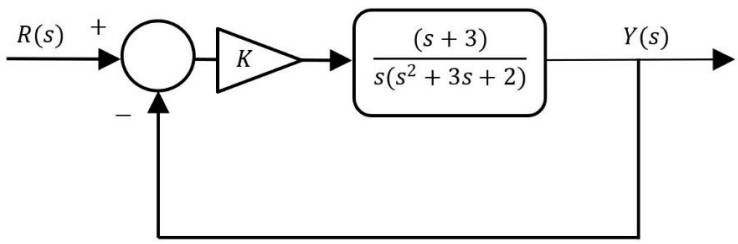
O gráfico do Lugar das Raízes referente ao sistema, para K > 0, representado na figura acima é:
Considere o sistema de malha fechada com um controlador do tipo PI, conforme apresentado na figura abaixo.
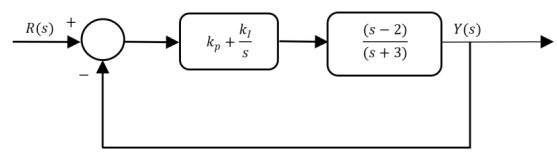
As faixas de valores para os ganhos kp e kI para as quais o sistema de malha fechada é estável são:
Considere o sistema de controle apresentado na figura abaixo.
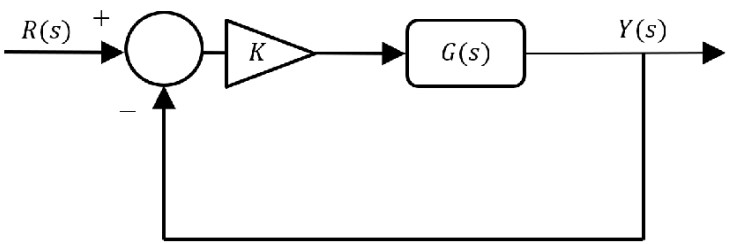
O diagrama de Bode do sistema com função de transferência G(s) é exibido na figura a seguir.
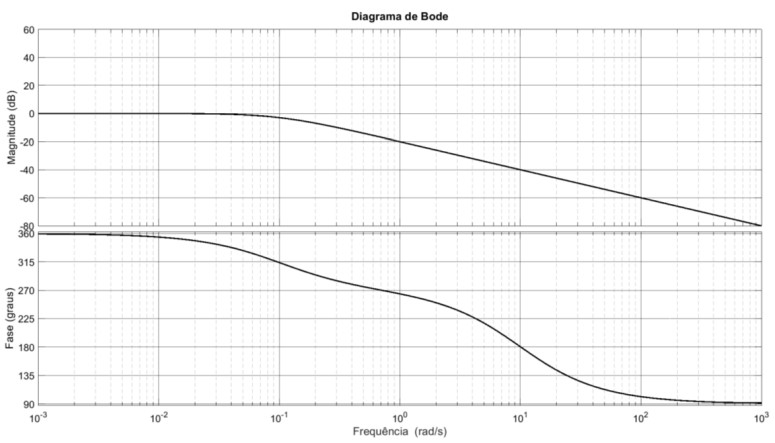
Considerando-se que o ganho K do controlador proporcional foi projetado para que o erro em regime permanente para uma entrada R(s) em degrau unitário seja menor que 10%, assinale a alternativa cujos valores das margens de fase e de ganho de KG(s) mais se aproximam dos valores corretos.
Em relação às fontes de ruído em sistemas eletrônicos, analise as afirmativas a seguir.
I. O ruído térmico é diretamente proporcional à temperatura e é caracterizado por uma forma de onda que nunca se repete exatamente; ou seja, é puramente aleatória. O seu espectro de potência é plano com a frequência e como todas as frequências estão presentes nesse ruído, ele é chamado de ruído branco.
II. A potência produzida pelo ruído shot é diretamente proporcional à corrente de polarização. Assim como o ruído térmico, o ruído shot é puramente aleatório e costuma ser chamado ruído rosa, porque a maioria da potência se concentra na extremidade inferior do espectro de frequência.
III. A potência do ruído flicker é proporcional à corrente de polarização e, diferentemente dos ruídos térmico e shot, diminui com a frequência. O ruído flicker é fundamentalmente aleatório, contudo, o seu espectro de frequência não é plano.
IV. O ruído impulsivo é um ruído de baixa frequência, de nível discreto e ocorrência aleatória. É muito específico de cada dispositivo, aumenta com o nível de corrente de polarização e é inversamente proporcional ao quadrado da frequência.
Estão corretas APENAS as afirmativas:
Analise o circuito pneumático apresentado na figura abaixo.
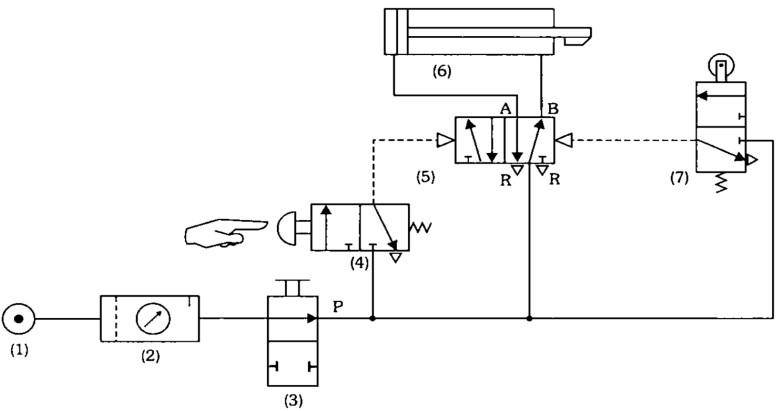
FIALHO, Arivelto Bustamante. Automação pneumática: projetos, dimensionamento e análise de circuitos. 7. ed. São Paulo: Érica, 2011.
Sobre o circuito acima, é possível afirmar que:
O ruído eletromagnético presente em ambientes industriais é um desafio importante para a transmissão de sinais digitais no chão de fábrica. Abaixo estão listadas algumas tecnologias implementadas em redes industriais.
I. A rede DEVICENET utiliza terminadores nas extremidades.
II. A rede PROFINET utiliza meios ópticos de transmissão.
III. A rede CAN utiliza codificação diferencial.
Qual(is) tecnologia(s) reduz(em) a suscetibilidade da rede a interferências eletromagnéticas externas?
Analise os diagramas de blocos de três sistemas amostrados conforme abaixo.
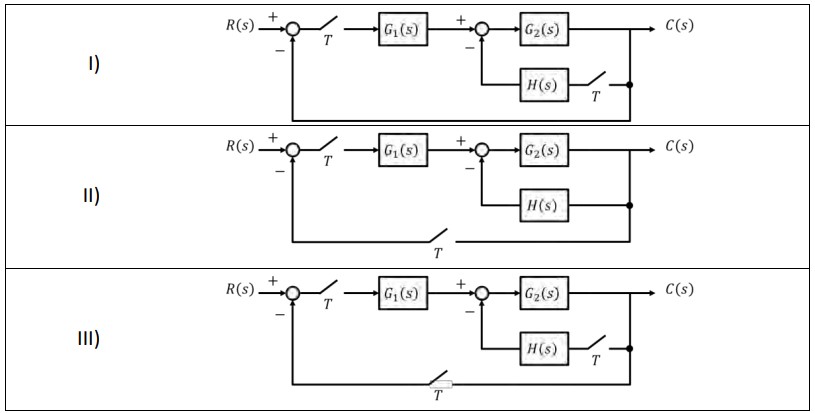
Para análise de sistemas amostrados, é comum obter a função de transferência de malha fechada no domínio z. Sobre a função de transferência C(z) / R(z) dos diagramas de blocos apresentados, é possível afirmar que:
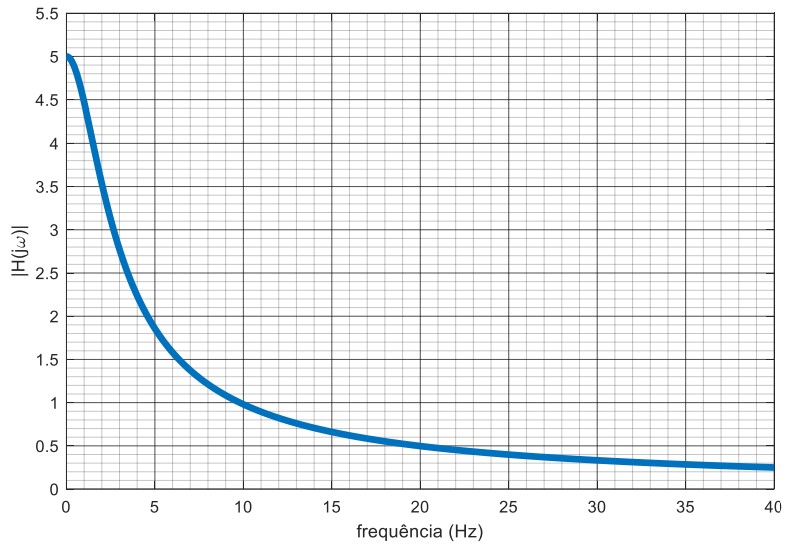
O diagrama de Bode de um sistema G(s) é apresentado a seguir.
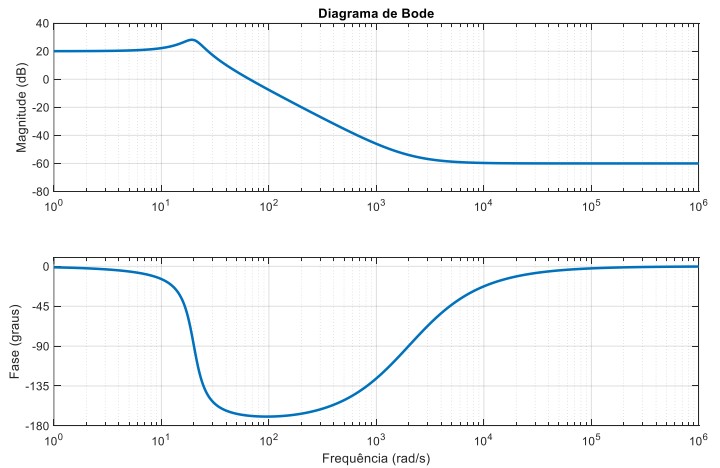
Com base no diagrama de Bode apresentado, a função de transferência ????(????) é dada por:
A resposta em frequência de um sistema de fase nula H (jω) é representada abaixo.
Um sinal x (t), dado por:

é aplicado na entrada do sistema, gerando o sinal de saída y(t).
Selecione a alternativa que especifica corretamente o sinal y(t).
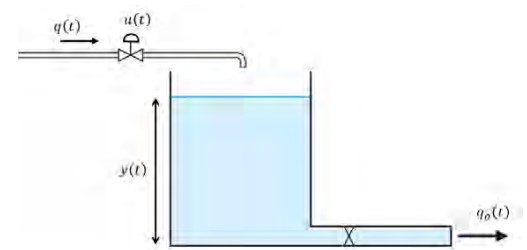
Um sistema de controle de nível é representado abaixo, em que a variável manipulada é a abertura da válvula u(t) e a variável controlada é o nível do tanque y(t).
Adaptado de DORF, Richard C.; BISHOP, Robert H. Sistemas de Controle Modernos. 12. ed. Rio de Janeiro: LTC, 2013.
O reservatório possui formato cilíndrico com área da base A1, a tubulação de saída é aberta à atmosfera, com área da seção transversal A2, em que A2 ≪ A1. A vazão de entrada e de saída é denotada, respectivamente, por q(t) e q0 (t).
Analise as afirmativas sobre a modelagem desse sistema.
I. Trata-se de um sistema não linear, pois a vazão de saída q0 (t) depende da raiz quadrada do nível. O sistema pode ser linearizado em torno de um ponto de operação por meio da expansão em série de Taylor.
II. A função de transferência aproximada do sistema é marginalmente estável, com ao menos um polo na origem, devido à característica de sistema integrador relacionada à presença do reservatório.
III. Um modelo mais realista deve inserir efeitos de saturação da variável manipulada, uma vez que a válvula de controle não pode assumir valores negativos e nem exceder sua abertura de 100%.
IV. São exemplos de perturbação e variação paramétrica, respectivamente, a variação da pressão da linha de entrada e a alteração da massa específica do fluido, uma vez que nenhum fluido é perfeitamente incompressível.
Estão corretas as afirmativas:
Considere o sistema de processamento de sinais de tempo discreto representado na figura a seguir, em que são representados dois multiplicadores de sinais e uma função de transferência.
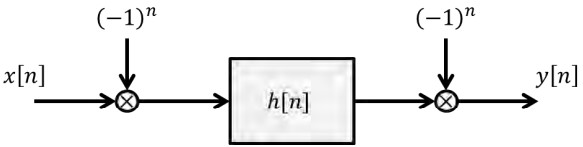
Foi aplicado um sinal real de entrada, x [n], no sistema acima, em que parte da sua transformada de Fourier de tempo discreto é representada na figura abaixo, juntamente com a resposta em frequência H (e jω).
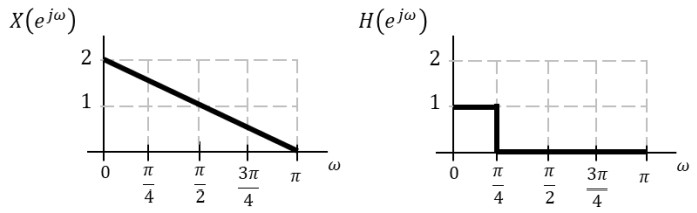
Selecione a alternativa que melhor representa a transformada de Fourier de tempo discreto do sinal de saída:
Considere o sistema discreto no tempo descrito por:
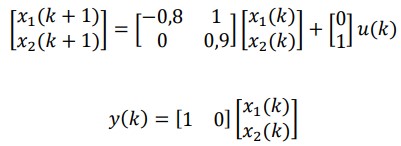
Sobre esse sistema, é correto afirmar que é:
Com relação aos Sistemas SCADA (Supervisory Control and Data Acquisition) ou Sistemas Supervisórios, como são comumente referidos no Brasil, analise as afirmativas seguintes:
I. Disponibilizam recursos como telas de sinópticos, gráficos de tendência (dinâmica e histórica), configuração e emissão de relatórios e gerenciamento de alarmes, além de gráficos de controle estatístico de processos.
II. Permitem aos operadores executarem funções de operação do processo, como liga/desliga e seleção de modo de operação e funções de supervisão do processo, como visualização de estados e variáveis, por meio de interfaces humano-máquina (IHM).
III. Podem ser denominados IHM, simplesmente, pois são interfaces amigáveis de alto nível para a visualização de dados de um processo em tempo real.
IV. Possuem uma ferramenta de desenvolvimento (development time), uma ferramenta de execução/visualização (runtime), uma base de dados (dicionário de tags ou etiquetas), drivers e protocolos de comunicação.
Selecione a única opção que relaciona todas as afirmativas corretas.
Considere o circuito de transmissão analógica em 4 a 20 mA (esquemático simplificado, em que a alimentação do Amplificador Operacional é omitida) mostrado na figura seguinte e avalie as afirmativas relacionadas:
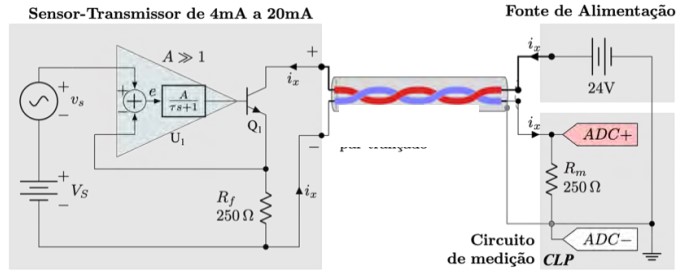
I. Este circuito caracteriza a transmissão a dois fios de sinais analógicos em corrente no padrão 4mA a 20mA.
II. O Amplificador Operacional (U1) manipula a tensão na base do transistor (Q1) de maneira a igualar as tensões em suas entradas inversora e não inversora.
III. O Amplificador Operacional (U1) desempenha a função de um controlador proporcional em malha fechada neste circuito de transmissão analógica.
IV. A corrente ix que circula no cabo de par trançado entre sensor e CLP é modificada por perturbações devido a ruído eletromagnético e a impedância do cabo.
Selecione a única opção que relaciona todas as afirmativas corretas.
Durante o processo de calibração de um medidor de nível, com transmissão em corrente no padrão de 4 a 20mA, obteve-se a reta mostrada na figura seguinte.
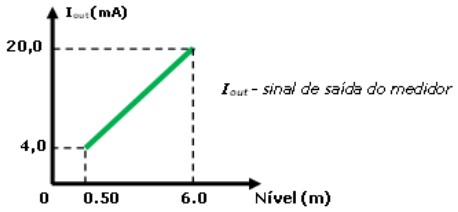
Considerando o resultado da calibração, qual o valor do nível medido para um sinal transmitido de 11,5 mA, e qual o valor do ganho deste medidor?
É preciso medir a vazão de água industrial, com partículas de sólidos em suspensão e condutividade de 10 μS.cm-1, em uma tubulação de 6 polegadas, cheia, sujeita a vibração, em área não-classificada.
Avalie as alternativas seguintes e marque a mais adequada, técnica e economicamente, para esta aplicação.
Analise as afirmativas seguintes, referentes a características de Controladores Lógicos Programáveis – CLP’s:
I. Para garantir o atendimento às exigências de um sistema de tempo real o programa de controle deve monitorar regularmente os sinais de entrada provenientes do processo. Isto é garantido pela execução cíclica do programa em CLP’s num período denominado varredura (SCAN).
II. Depois do advento dos CLP’s os relés e os contatores tornaram-se dispensáveis à automação industrial, minimizando problemas de manutenção com desgastes mecânicos das partes móveis, ruídos e dissipação térmica associados a estes dispositivos.
III. Um passo na linguagem SFC representa um estado particular do sistema, recebe um nome único, só pode aparecer uma vez na rede SFC e pode possuir somente uma ação de controle associada a ele para descrever seu comportamento.
IV. Tanto funções como blocos funcionais são referidos como blocos, mas apenas os blocos funcionais possuem persistência de dados por meio da estrutura de dados criada quando instância é declarada.
Selecione a única opção que relaciona todas as afirmativas corretas.
O trecho de programa seguinte implementa uma lógica de controle para a partida direta (simples) de um motor, implementada em linguagem Ladder.
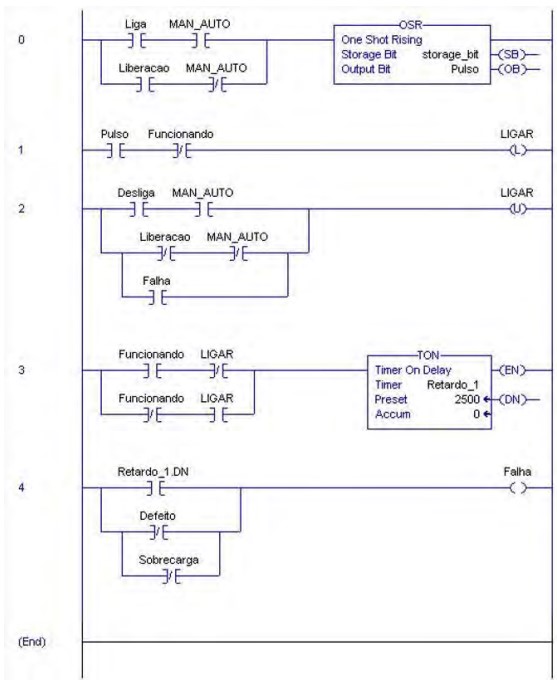
Neste programa o bloco OSR (One Shot Rising, na linha 0), implementa a detecção a bordas de subida. Ele faz com que sua saída OB (Output Bit, associada a variável Pulso) seja setada toda vez que sua entrada sofrer uma transição lógica ascendente. Nas demais condições, o bit de saída permanece em nível lógico baixo. Analise as afirmativas seguintes, referentes a este programa de partida direta de um motor:
I. Uma vez acionada a saída Ligar, o motor será desligado se, dentro de 2,5s não houver o retorno de que ele foi realmente ligado.
II. Se, após a saída Ligar ser acionada o sinal Funcionando sofrer uma transição lógica ascendente, o motor é desligado.
III. A realimentação do sinal Ligar em forma de contato de selo não é necessária uma vez que bobinas tipo Set (Latch - retentiva) e Reset (Unlatch – não retentiva) são usadas nas linhas 1 e 2 do programa para programar o ligamento/desligamento do motor.
IV. É possível usar a entrada Liberação para que, em modo automático, lógicas externas comandem o motor em função de, por exemplo, sequenciamento de equipamentos do processo.
Selecione a única opção que relaciona todas as afirmativas corretas.