Questões de Concurso
Sobre sistemas embarcados e controladores em engenharia mecatrônica
Foram encontradas 43 questões
Em redes neurais artificiais, as funções ativação do tipo sigmoide são não lineares, suaves e continuamente diferenciáveis.
Considere um sistema de controle, cujo valor complexo da função de transferência de malha aberta F(s) é conhecida para duas frequências de interesse w1 e w2:
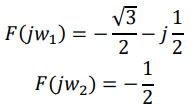
A partir dos dados desse sistema de controle, os valores da margem de ganho e da margem de fase, respectivamente, são
No que se refere à sintonia do controlador proporcional-integral-derivativo (PID), julgue o item a seguir.
derivativa do cálculo.
80 Um controlador PID calcula, inicialmente, o erro entre a
variável controlada e seu valor desejado.
No que se refere à sintonia do controlador proporcional-integral-derivativo (PID), julgue o item a seguir.
No algoritmo de um controlador PID digital, se houver erro
no cálculo, haverá desalinhamento apenas na etapa
derivativa do cálculo.
Na etapa proporcional do controle PID, o sinal de controle aplicado a cada instante à planta é proporcional à amplitude do valor do sinal de erro.
Julgue o item a seguir, relativos a controladores lógicos programáveis (CLP).
Devido a suas características, um CLP não é capaz de lidar
com variáveis analógicas, tampouco com tensão elétrica.
Analise a figura abaixo.
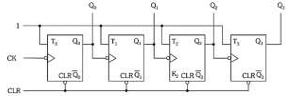
Assinale a alternativa que corresponda à montagem apresentada.
Em relação às características de um amplificador operacional (AO) e suas aplicações, assinale V para as afirmativas VERDADEIRAS e F para as afirmativas FALSAS.
( ) São características de um AO a alta impedância de entrada, o alto ganho de tensão, a malha aberta (na ordem de centenas de milhares) e a baixa impedância de saída (abaixo de 100 Ω).
( ) Um parâmetro de especificação de um AO é o SLEW-RATE (Taxa de subida).
( ) Na análise dos circuitos que fazem uso de amplificadores operacionais, pode-se considerar que as correntes de entrada, presentes nas entradas inversora e não-inversora, são nulas.
( ) A configuração “Amplificador Inversor” apresenta ganho de tensão controlável e finito à malha fechada com a manutenção da fase entre os sinais de entrada e saída.
( ) O circuito seguidor de emissor com uso de AO possui ganho unitário e define a tensão de saída com inversão de fase em relação à tensão de entrada.
Assinale a alternativa que contém a sequência CORRETA da classificação de cima para baixo.
1. EEPROM são memórias internas ao equipamento, programadas pelo fabricante, e só podem ser apagadas com ultravioleta. 2. Tempo de varredura é o tempo que o CLP leva para cumprir um ciclo completo, sendo também denominado scantime. 3. Linguagens Ladder, diagrama de blocos e listas de instruções são tipos de linguagem de programação para CLPs.
Assinale a alternativa correta.
Internamente em um processador, existem diversos componentes conectados. Um conjunto de fios paralelos e que transmitem endereços, dados e sinais de controle é conhecido como
dada pela expressão a seguir.

Considerando essa expressão e a resposta em frequência do
circuito, julgue os próximos itens.