Questões de Concurso
Sobre eletrônica na engenharia mecatrônica em engenharia mecatrônica
Foram encontradas 93 questões
Assinale a alternativa que representa o erro de montagem mais provável para o LED permanecer apagado após a montagem, mesmo sem estar queimado.
Considere a expressão de um circuito lógico combinacional apresentado a seguir:
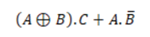
Com base nessa expressão podemos afirmar que a:
Disponível em: https://www.cummins.com/pt/news/2023/11/03/what-electronic-control-module-ecm. Acesso em: 28 set. 2024. (adaptado)
Um veículo apresenta sintomas como aceleração irregular e dificuldade em manter a marcha lenta. O técnico de manutenção verificou que os códigos de falha indicam um problema no sensor de posição da borboleta (TPS), mas, ao medir a resistência no sensor, os valores estão dentro da faixa especificada pelo fabricante. Qual deve ser o próximo passo no diagnóstico do problema?
Em redes neurais artificiais, as funções ativação do tipo sigmoide são não lineares, suaves e continuamente diferenciáveis.
Na modelagem de sistemas mecatrônicos não lineares, destacam-se as representações matemáticas por função de transferência e espaço de estados, definidas no domínio da frequência.
Considere um sistema de controle, cujo valor complexo da função de transferência de malha aberta F(s) é conhecida para duas frequências de interesse w1 e w2:
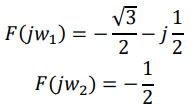
A partir dos dados desse sistema de controle, os valores da margem de ganho e da margem de fase, respectivamente, são
No que se refere à sintonia do controlador proporcional-integral-derivativo (PID), julgue o item a seguir.
derivativa do cálculo.
80 Um controlador PID calcula, inicialmente, o erro entre a
variável controlada e seu valor desejado.
No que se refere à sintonia do controlador proporcional-integral-derivativo (PID), julgue o item a seguir.
No algoritmo de um controlador PID digital, se houver erro
no cálculo, haverá desalinhamento apenas na etapa
derivativa do cálculo.
Na etapa proporcional do controle PID, o sinal de controle aplicado a cada instante à planta é proporcional à amplitude do valor do sinal de erro.
Julgue o item a seguir, relativos a controladores lógicos programáveis (CLP).
Devido a suas características, um CLP não é capaz de lidar
com variáveis analógicas, tampouco com tensão elétrica.
Analise a figura abaixo.
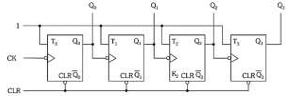
Assinale a alternativa que corresponda à montagem apresentada.

Com relação a técnicas de processamento digital de imagens em visão computacional aplicada à robótica, julgue o próximo item.
A transformada de Hough corresponde a uma técnica para
suavizar as bordas de determinada forma geométrica na
imagem.
Com relação a técnicas de processamento digital de imagens em visão computacional aplicada à robótica, julgue o próximo item.
Se uma imagem tiver sido corrompida por ruídos impulsivos
durante o processo de captura, é possível atenuar esses
ruídos com a utilização de um filtro de mediana.
Com relação a técnicas de processamento digital de imagens em visão computacional aplicada à robótica, julgue o próximo item.
Segmentação corresponde ao particionamento de regiões na
imagem que tenham significados específicos para
determinada aplicação.