Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 650 questões
Ano: 2010
Banca:
FCC
Órgão:
TRT - 8ª Região (PA e AP)
Prova:
FCC - 2010 - TRT - 8ª Região (PA e AP) - Analista Judiciário - Engenharia Elétrica |
Q82768
Engenharia Eletrônica
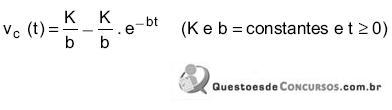
Um sistema de primeira ordem tem como resposta à entrada degrau a expressão:
A transformada de Laplace dessa resposta é:
A transformada de Laplace dessa resposta é:
Ano: 2010
Banca:
FCC
Órgão:
TRT - 8ª Região (PA e AP)
Prova:
FCC - 2010 - TRT - 8ª Região (PA e AP) - Analista Judiciário - Engenharia Elétrica |
Q82758
Engenharia Eletrônica

Ano: 2010
Banca:
FCC
Órgão:
TRT - 8ª Região (PA e AP)
Prova:
FCC - 2010 - TRT - 8ª Região (PA e AP) - Analista Judiciário - Engenharia Elétrica |
Q82741
Engenharia Eletrônica
Considere as figuras I e II abaixo.
I. Sistema de controle proporcional-integral de velocidade de um motor DC:
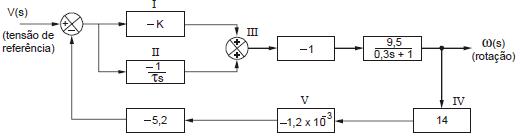
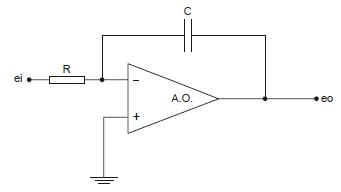
II. Circuito integrador:
No sistema, o circuito integrador está representado pelo bloco
I. Sistema de controle proporcional-integral de velocidade de um motor DC:
II. Circuito integrador:
No sistema, o circuito integrador está representado pelo bloco
Ano: 2010
Banca:
FCC
Órgão:
TRT - 8ª Região (PA e AP)
Prova:
FCC - 2010 - TRT - 8ª Região (PA e AP) - Analista Judiciário - Engenharia Elétrica |
Q82736
Engenharia Eletrônica
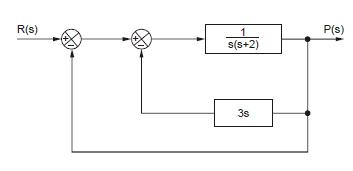
A função de transferência F(s) = P(s)/R(s) do sistema de controle abaixo é dada por:
Q75010
Engenharia Eletrônica
O gráfico abaixo representa a resposta típica no domínio do tempo de um sistema de controle com entrada R(s) = 1/s e saída C(s) e cuja função de transferência é K/(s + b), sendo K e b constantes:
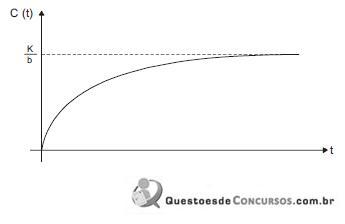
Trata-se de um sistema de
Trata-se de um sistema de
Q74993
Engenharia Eletrônica
Um circuito composto de um resistor R e um capacitor C em série é alimentado por um gerador de tensão senoidal Vi(t). Sendo Vo(t) a tensão no capacitor, a transformada de Laplace da função de transferência F(s) = Vo(s) / Vi(s) é igual a:
Ano: 2010
Banca:
FCC
Órgão:
METRÔ-SP
Prova:
FCC - 2010 - METRÔ-SP - Engenheiro Júnior - Engenharia Elétrica |
Q74934
Engenharia Eletrônica
A resposta à entrada degrau de um sistema de primeira ordem é dada por:
A transformada de Laplace dessa resposta é:
A transformada de Laplace dessa resposta é:
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Engenharia Elétrica |
Q74515
Engenharia Eletrônica
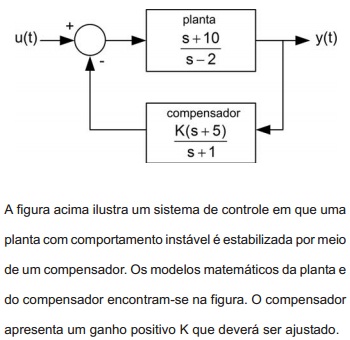
Verifica-se que para um determinado valor de K, o sistema em malha fechada apresenta um polo localizado em s = -8 . Este valor é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Engenharia Elétrica |
Q74514
Engenharia Eletrônica
Aumentando-se o valor de K a partir de zero, o valor limite em que o sistema passará a ter um comportamento estável é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Engenharia Elétrica |
Q74513
Engenharia Eletrônica
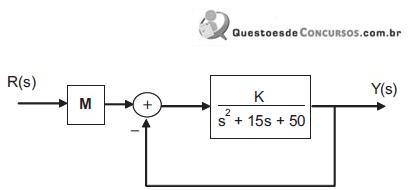
A figura acima apresenta o diagrama em blocos de um sistema de controle em malha fechada. Para que no domínio do tempo a saída y(t) siga a entrada de referência r(t), do tipo degrau, com erro de estado estacionário NULO, a expressão do ganho M será
Q74056
Engenharia Eletrônica
Em uma rede PERT-CPM uma atividade possui a primeira data de início igual a 6 u.t. e duração igual a 4 u.t.
Sua primeira data de término será:
Sua primeira data de término será:
Ano: 2010
Banca:
CESGRANRIO
Órgão:
ELETROBRAS
Prova:
CESGRANRIO - 2010 - ELETROBRAS - Engenheiro Eletricista |
Q63960
Engenharia Eletrônica
A função de transferência de um sistema, após a aplicação de uma malha de realimentação, é dada pela seguinte função:
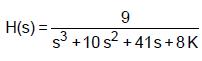
Em H(s), K é um parâmetro a ser calculado de tal forma que o sistema seja BIBO-estável. Para conseguir determinar as faixas de K que atendem a essa especificação, foi utilizado o Método de Routh-Hurwitz, cuja tabulação está a seguir.
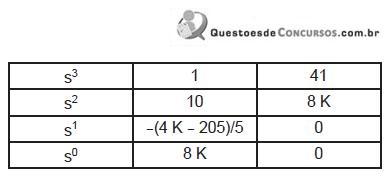
Com base nesses dados, a faixa de valores de K que torna o sistema realimentado BIBO-estável é
Em H(s), K é um parâmetro a ser calculado de tal forma que o sistema seja BIBO-estável. Para conseguir determinar as faixas de K que atendem a essa especificação, foi utilizado o Método de Routh-Hurwitz, cuja tabulação está a seguir.
Com base nesses dados, a faixa de valores de K que torna o sistema realimentado BIBO-estável é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
ELETROBRAS
Prova:
CESGRANRIO - 2010 - ELETROBRAS - Engenheiro Eletricista |
Q63959
Engenharia Eletrônica
O controle de sistemas, muitas vezes, exige que o sinal de saída seja processado e adicionado à variável de entrada, o que é designado como realimentação de saída.
Nessa perspectiva, considere o diagrama em blocos a seguir.
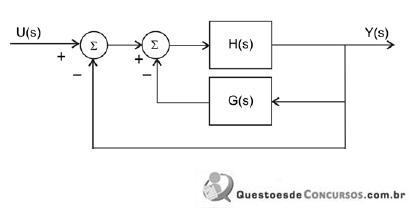
No diagrama, pode-se observar a existência de duas realimentações: uma unitária e uma através de um bloco com dinâmica. Suponha que:
. o sistema original a ser controlado tenha sua função de transferência de ordem 3;
. o bloco controlador, cuja função de transferência é G(s), seja de grau 2, isto é, sua função de transferência seja de segunda ordem.
Tanto H(s) quanto G(s) são funções racionais polinomiais estritamente próprias. A máxima ordem possível para a função de transferência equivalente ao diagrama apresentado é
Nessa perspectiva, considere o diagrama em blocos a seguir.
No diagrama, pode-se observar a existência de duas realimentações: uma unitária e uma através de um bloco com dinâmica. Suponha que:
. o sistema original a ser controlado tenha sua função de transferência de ordem 3;
. o bloco controlador, cuja função de transferência é G(s), seja de grau 2, isto é, sua função de transferência seja de segunda ordem.
Tanto H(s) quanto G(s) são funções racionais polinomiais estritamente próprias. A máxima ordem possível para a função de transferência equivalente ao diagrama apresentado é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
ELETROBRAS
Prova:
CESGRANRIO - 2010 - ELETROBRAS - Engenheiro Eletricista |
Q63958
Engenharia Eletrônica
Um ensaio de resposta impulsional foi realizado com um sistema linear, invariante no tempo, a tempo contínuo, causal e monovariável. A resposta impulsional, calculada a partir da saída, é

Qual é a função de transferência do sistema?
Qual é a função de transferência do sistema?
Ano: 2010
Banca:
CESGRANRIO
Órgão:
ELETROBRAS
Prova:
CESGRANRIO - 2010 - ELETROBRAS - Engenheiro Eletricista |
Q63957
Engenharia Eletrônica
Um dos aspectos mais importantes na área de sistemas de controle é a estabilidade desses sistemas. Existem várias definições para estabilidade, cada uma focada em um tipo de modelo e/ou em um tipo de resposta em consideração. Um dos conceitos mais usados é o da Estabilidade BIBO (Bounded Input - Bounded Output).
Nessa perspectiva, considere o diagrama em blocos a seguir.
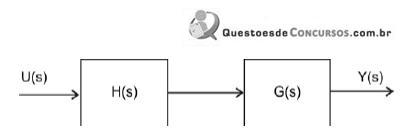
Nesse diagrama, H(s) é uma função dada, e G(s) é uma função parcialmente especificada, com um parâmetro a determinar. H(s) é dada por:
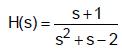
O polinômio do denominador de H(s) não é um polinômio de Hurwitz e, então, H(s) não pode representar um sistema BIBO-estável. Para estabilizar o sistema, acrescentase G(s), de tal forma que a conexão seja BIBO-estável. A forma escolhida para G(s) é:
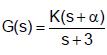 , onde K é um número real.
, onde K é um número real.
Qual dos valores de α, apresentados abaixo, permite que o conjunto da figura seja BIBO-estável?
Nessa perspectiva, considere o diagrama em blocos a seguir.
Nesse diagrama, H(s) é uma função dada, e G(s) é uma função parcialmente especificada, com um parâmetro a determinar. H(s) é dada por:
O polinômio do denominador de H(s) não é um polinômio de Hurwitz e, então, H(s) não pode representar um sistema BIBO-estável. Para estabilizar o sistema, acrescentase G(s), de tal forma que a conexão seja BIBO-estável. A forma escolhida para G(s) é:
, onde K é um número real.Qual dos valores de α, apresentados abaixo, permite que o conjunto da figura seja BIBO-estável?
Ano: 2009
Banca:
CESPE / CEBRASPE
Órgão:
TRE-GO
Prova:
CESPE / CEBRASPE - 2009 - TRE-GO - Técnico Judiciário - Serviços Gerais - Eletricidade e Telecomunicações |
Q2252802
Engenharia Eletrônica
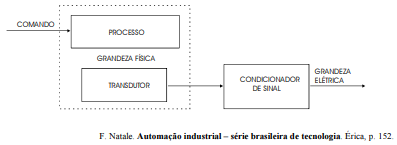
A figura acima mostra um diagrama de blocos que ilustra um processo
analógico de transdução, no qual um sinal de comando é convertido em
grandeza elétrica por meio da atuação de um transdutor e de um
condicionador de sinal. Nesse sistema, o condicionador de sinal
Ano: 2009
Banca:
FCC
Órgão:
TRT - 4ª REGIÃO (RS)
Prova:
FCC - 2009 - TRT - 4ª REGIÃO (RS) - Analista Judiciário - Engenharia Elétrica |
Q73623
Engenharia Eletrônica
Considere o sistema de controle abaixo.
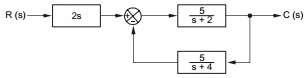
A função de transferência é dada por:
A função de transferência é dada por:
Ano: 2009
Banca:
FCC
Órgão:
TRT - 4ª REGIÃO (RS)
Prova:
FCC - 2009 - TRT - 4ª REGIÃO (RS) - Analista Judiciário - Engenharia Elétrica |
Q73614
Engenharia Eletrônica
A função de transferência de um sistema de controle é
dada por  . Logo, esse sistema possui
. Logo, esse sistema possui
. Logo, esse sistema possui
Ano: 2009
Banca:
CESPE / CEBRASPE
Órgão:
DETRAN-DF
Prova:
CESPE - 2009 - DETRAN-DF - Analista - Engenharia Elétrica |
Q73580
Engenharia Eletrônica
Texto associado
Suponha que um sistema dinâmico linear, contínuo,
monovariável, com entrada u(t) e saída y(t), em malha-aberta, é
representado pela função de transferência (FT) . Acerca desse sistema, julgue os itens
. Acerca desse sistema, julgue os itens
seguintes.
monovariável, com entrada u(t) e saída y(t), em malha-aberta, é
representado pela função de transferência (FT)
. Acerca desse sistema, julgue os itensseguintes.
Suponha que a magnitude da resposta em frequência desse sistema a uma dada frequência seja igual a -10 dB. Nessa situação, a frequência angular correspondente a essa magnitude é inferior a 1 rad/s.
Ano: 2009
Banca:
CESPE / CEBRASPE
Órgão:
DETRAN-DF
Prova:
CESPE - 2009 - DETRAN-DF - Analista - Engenharia Elétrica |
Q73579
Engenharia Eletrônica
Texto associado
Suponha que um sistema dinâmico linear, contínuo,
monovariável, com entrada u(t) e saída y(t), em malha-aberta, é
representado pela função de transferência (FT). Acerca desse sistema, julgue os itens
seguintes.
monovariável, com entrada u(t) e saída y(t), em malha-aberta, é
representado pela função de transferência (FT)
. Acerca desse sistema, julgue os itensseguintes.
A FT desse sistema não contém zeros finitos.