Questões de Concurso
Sobre função de transferência em engenharia eletrônica
Foram encontradas 246 questões
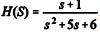
 Visando uma aplicação que requer dados na forma discreta, será necessário converter essa função de transferência para o domínio do tempo discreto utilizando a transformada Z. Para esta conversão, é utilizada a transformação bilinear com frequência de amostragem igual a 5 Hz. Com base nessas informações, julgue o item que se segue.
Visando uma aplicação que requer dados na forma discreta, será necessário converter essa função de transferência para o domínio do tempo discreto utilizando a transformada Z. Para esta conversão, é utilizada a transformação bilinear com frequência de amostragem igual a 5 Hz. Com base nessas informações, julgue o item que se segue.A função de transferência equivalente no domínio da transformada Z é H(z) =1 - z -1
Visando uma aplicação que requer dados na forma discreta, será necessário converter essa função de transferência para o domínio do tempo discreto utilizando a transformada Z. Para esta conversão, é utilizada a transformação bilinear com frequência de amostragem igual a 5 Hz. Com base nessas informações, julgue o item que se segue.O sistema contínuo não apresenta zeros e polos no infinito.
Visando uma aplicação que requer dados na forma discreta, será necessário converter essa função de transferência para o domínio do tempo discreto utilizando a transformada Z. Para esta conversão, é utilizada a transformação bilinear com frequência de amostragem igual a 5 Hz. Com base nessas informações, julgue o item que se segue.A resposta ao impulso do sistema contínuo é dada por h(t) = 2 - 20e -10t, para t ≥ 0 .
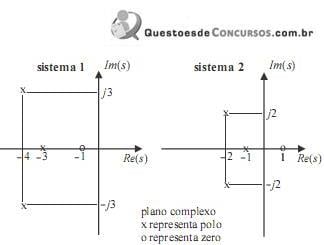
Considere dois sistemas dinâmicos lineares cujos polos e zeros de suas funções de transferência em malha fechada são ilustrados na figura abaixo. Nessa situação, é correto afirmar que ambos os sistemas são estáveis, as constantes de tempo do sistema 1 são menores que as constantes de tempo do sistema 2, e a frequência natural do sistema 1 é maior que a frequência natural do sistema 2.
 , julgue os itens que se seguem.
, julgue os itens que se seguem.O filtro é do tipo passa-alta.
, julgue os itens que se seguem.Considere que um sinal analógico u(t) seja aplicado à entrada do filtro, resultando em um sinal filtrado y(t) na saída. Nessa situação, se h(t) é a resposta ao impulso do filtro, então o sinal filtrado pode ser obtido por meio da relação y(t) = h(t)u(t).

 cujas variáveis de estado são
cujas variáveis de estado são 
 , possui a equação de estados apresentada abaixo.
, possui a equação de estados apresentada abaixo.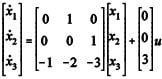
A representação na forma canônica diagonal de um sistema com função de transferência
 é dada por
é dada por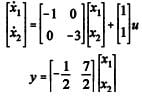
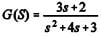
O módulo da função de transferência G (S) = 1/ S + 2 para 2 rad/s é menor que 1/2.
O ganho DC da função de transferência G(s) é menor que 2.
O sistema representado por G(s) é controlável.
Um sistema cuja resposta ao impulso seja dada pela função h(t) = e-t sen(3t), em que t é uma variável temporal contínua, será instável em regime permanente.
Na expansão em frações parciais da função de transferência Y (S) = - (S2 + S - 1)/ S (S + 1)(S + 2) o coeficiente da parcela do polo real igual a -1 será maior que 3.
 do sistema, presente na figura abaixo, é dada por
do sistema, presente na figura abaixo, é dada por 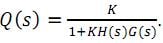
 . Se a entrada para o sistema tem valor igual a 10 (constante), então a resposta forçada do sistema será
. Se a entrada para o sistema tem valor igual a 10 (constante), então a resposta forçada do sistema será  .
.
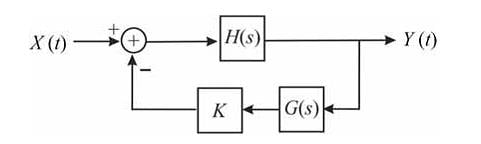
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro, e G(s) = s – b, em que b é uma constante real. No segundo,
e G(s) = s – b, em que b é uma constante real. No segundo,  e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
A função de transferência do sistema de tempo contínuo é
expressa por 
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro, e G(s) = s – b, em que b é uma constante real. No segundo, e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
O sistema de tempo discreto é do tipo FIR (finite impulse
response, ou resposta finita ao impulso).
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro,  e G(s) = s – b, em que b é uma constante real. No segundo,
e G(s) = s – b, em que b é uma constante real. No segundo,  e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
O sistema de tempo discreto é estável.