Questões de Concurso
Sobre função de transferência em engenharia eletrônica
Foram encontradas 251 questões
Examine o diagrama de blocos da figura abaixo.
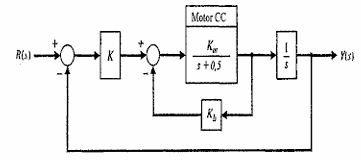
Diagrama de blocos (Fonte: Dorf, 2018)
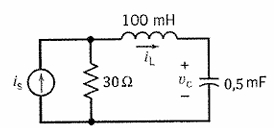
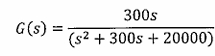
O modelo em diagrama de blocos de um motor CC controlado pela armadura é mostrado na figura acima. A função de transferência do motor é dada por:
Para Km = 1 e Kb = 0,5, o erro em regime permanente para uma entrada rampa, r(t) = t, t > 0,, será 1 (um) quando o valor do ganho K for igual a:
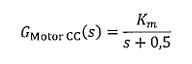
Examine o circuito abaixo.
Circuito Elétrico (Fonte: Ogata, 2016)
Qual é a função de transferência, G(s) = , do circuito apresentado acima, onde eo (t) é a tensão de saída, ei (t) é a tensão de entrada, R1 = R2 = 1Ω, L = 1H e C = 1F?
, do circuito apresentado acima, onde eo (t) é a tensão de saída, ei (t) é a tensão de entrada, R1 = R2 = 1Ω, L = 1H e C = 1F?
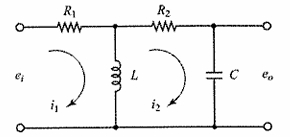
Examine o circuito abaixo.
Circuito elétrico (Fonte: Dorf, 2016)
Considere o circuito apresentado acima, onde a função de transferência, que relaciona a corrente de saída no indutor, iL (t), com a corrente de entrada, is (t), é dada por:
 .
.
A corrente no indutor iL (t) para t > 0, em amperes, quando uma corrente constante is (t) = 10A para t > 0, admitindo condições iniciais nulas, é igual a:
y (k) - 2y (k - 1) + 2y (k-2) = x (k) + x (k-1)
Foram calculados os polos e foi analisada a estabilidade do sistema, resultando em, respectivamente:
Examine o diagrama de blocos da figura abaixo.
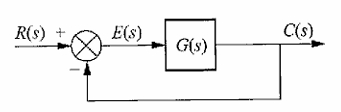
Considere um sistema de controlo com realimentação unitária negativa, representado pelo diagrama de blocos da figura, onde a função de transferência do ramo direto é dada por:
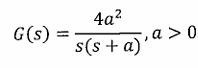
A resposta desse sistema para um entrada degrau unitário com frequência natural igual a 2 rad/s é igual a:
Examine o circuito da figura abaixo.
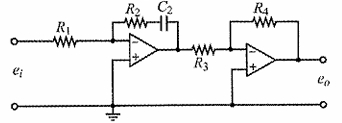
Circuito com amplificador operacional (Fonte: Ogata, 2015)
A figura acima mostra um controlador eletrônico proporcional-integral (PI) com amplificador operacional. A função de transferência do controlador é dada por:
Assim, as constantes KP e KI, em função de R1, R2, R3, R4 e C2, são iguais a:
Deseja-se analisar o erro em regime permanente para uma entrada do tipo degrau unitário r (t) = u(t). Diante desse contexto, assinale a alternativa correta.

Essa transformação
Assinale a opção que apresenta a escolha adequada de componentes, nesse contexto.
Utilize as informações a seguir para responder às próximas 3 (três) questões.
Em um multiplicador de dínodos discretos (Secondary Electron Multiplier), o íon se choca em um dínodo de conversão e libera elétrons secundários que são amplificados em vários estágios de dínodos até gerar um pulso detectável na saída do detector.
Este tipo de detector é utilizado em ICP-MS com analisador de massas por quadrupolo e realizam medidas chamadas de contagem de pulsos.
Durante a realização destas medidas, após o detector registrar um
pulso durante a detecção de um evento, ocorre um curto intervalo
de recuperação conhecido por tempo morto (dead time,  ), sendo
o reflexo do limite de velocidade do circuito de detecção. Durante
este intervalo de tempo, o sistema fica temporariamente
indisponível e qualquer evento não será contado ou irá distorcer a
medida.
), sendo
o reflexo do limite de velocidade do circuito de detecção. Durante
este intervalo de tempo, o sistema fica temporariamente
indisponível e qualquer evento não será contado ou irá distorcer a
medida.
Considere o modelo não-paralisável para descrever a taxa de
eventos observados R (contagens por segundo - cps) em função da
taxa real de eventos r (cps) e o dead time (s):

Com o objetivo de melhorar a relação sinal ruído (S/N) e preservar a linearidade nas medidas deve-se
Utilize as informações a seguir para responder às próximas 3 (três) questões.
Em um multiplicador de dínodos discretos (Secondary Electron Multiplier), o íon se choca em um dínodo de conversão e libera elétrons secundários que são amplificados em vários estágios de dínodos até gerar um pulso detectável na saída do detector.
Este tipo de detector é utilizado em ICP-MS com analisador de massas por quadrupolo e realizam medidas chamadas de contagem de pulsos.
Durante a realização destas medidas, após o detector registrar um
pulso durante a detecção de um evento, ocorre um curto intervalo
de recuperação conhecido por tempo morto (dead time, ), sendo
o reflexo do limite de velocidade do circuito de detecção. Durante
este intervalo de tempo, o sistema fica temporariamente
indisponível e qualquer evento não será contado ou irá distorcer a
medida.
Considere o modelo não-paralisável para descrever a taxa de
eventos observados R (contagens por segundo - cps) em função da
taxa real de eventos r (cps) e o dead time (s):
Os parâmetros controlados são:
Com base nos princípios, nas técnicas e nas aplicações a respeito dos sistemas lineares, não lineares e digitais, julgue o item a seguir.
Um sistema de controle em malha fechada será sempre mais estável que um sistema em malha aberta.
O mapa de polos e zeros de um sistema é mostrado na figura a seguir.

Em relação à figura, assinale V (verdadeiro) ou F (falso) nas afirmativas seguintes.
(__) O sistema tem três polos e quatro zeros.
(__) O sistema é instável.
(__) O sistema tem ao menos um polo estável.
(__) O sistema tem quatro zeros de fase não mínima.
A sequência correta é
Utilize a figura a seguir para responder à questão.

A figura ilustra um diagrama de blocos de um sistema linear
com realimentação negativa, sendo o ganho do percurso
direto igual a G(s) 2/S+3', e o ganho do percurso de
realimentação igual a H(s) = 1/S.
Utilize a figura a seguir para responder à questão.
A figura ilustra um diagrama de blocos de um sistema linear
com realimentação negativa, sendo o ganho do percurso
direto igual a G(s) 2/S+3', e o ganho do percurso de
realimentação igual a H(s) = 1/S.

Após análise do sistema, os zeros da função de transferência desse sistema de controle valem
Ao ser aplicado um Impulso Unitário na entrada desse sistema, o sinal de saída oscilará na forma de uma senoide exponencialmente amortecida.
Dessa forma, pelo exposto acima, a constante conhecida como Razão de Amortecimento desse sistema vale
Um circuito elétrico é composto por uma fonte de tensão vF(t) que alimenta três componentes considerados ideais: um resistor de resistência R, um capacitor de capacitância C e um indutor de indutância L, todos associados em série. Fechando o circuito da fonte sobre esses três componentes ligados em série, uma corrente i(t) vai circular. A dinâmica desse sistema é regida por uma equação diferencial, obtida pela lei de Kirchoff, que relaciona a soma das tensões nesta malha: vF(t) = vR(t) + vC(t) + vL (t).
As relações entre as tensões e a corrente da malha são:

Com base nos dados, considerando-se todas as condições iniciais nulas, qual é a expressão da Função de Transferência,
no domínio de Laplace, que liga a corrente elétrica de saída com a tensão da fonte de alimentação, ou seja, a expressão
de 