Questões de Concurso
Sobre linguagens de programação para engenharia de automação em engenharia de automação
Foram encontradas 36 questões
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328594
Engenharia de Automação
Em um sistema supervisório, é possível monitorar e controlar uma planta industrial, permitindo ações proativas a
fim de melhorar a produtividade da planta.
A seguinte caracterização NÃO descreve adequadamente um sistema supervisório:
A seguinte caracterização NÃO descreve adequadamente um sistema supervisório:
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328591
Engenharia de Automação
Um sistema automatizado é composto por três elementos: 1 - Sistema de Energia; 2 - Programa de Instruções;
e 3 - Sistema de Controle.
Considerando-se uma operação automatizada de torneamento, o programa de instruções
Considerando-se uma operação automatizada de torneamento, o programa de instruções
Ano: 2023
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2023 - IF-SP - Técnico de Laboratório/Área: Mecatrônica |
Q2287675
Engenharia de Automação
Dentro da indústria de manufatura, a programação offline (OLP) tem se tornado uma prática
comum na programação de robôs. Com relação à
OLP, qual das seguintes afirmações é verdadeira?
Q4148956
Engenharia de Automação
O diagrama Ladder, apresentado a seguir, é composto pelo contato S1, pelas saídas K1 e K2 e por um temporizador T1 com atraso no desligamento.
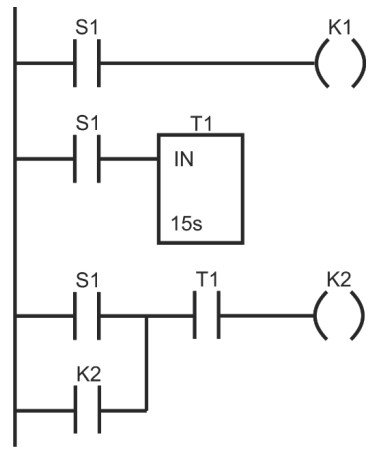
Assinale a alternativa correta sobre o funcionamento da programação apresentada.
Q4148955
Engenharia de Automação
A IEC 61131-3 especifica a sintaxe e a semântica das linguagens de programação para Controladores Lógicos Programáveis (CLP).
Assinale a alternativa que apresenta apenas linguagens definidas pela norma em questão.
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081678
Engenharia de Automação
Uma característica importante dos robôs industriais
é sua versatilidade, a qual permite que sejam programados para executar atividades distintas.
Avalie as afirmações sobre as maneiras de programação de tais dispositivos.
I - Na programação por aprendizagem, o operador humano posiciona as juntas em configurações sequenciais da trajetória desejada, usando um dispositivo eletrônico, que pode ser um joystick. Essas configurações são armazenadas pelo robô e repetidas durante a execução.
II - Uma das desvantagens da programação por aprendizagem consiste na impossibilidade de executar o aprendizado com carga sendo transportada pelo efetuador do manipulador robótico.
III - Na programação por linguagem textual, o operador deve usar uma linguagem de programação, geralmente com termos de língua inglesa, visando codificar instruções no programa.
IV - A programação mecânica consiste em usar chaves fim-de-curso, contatores elétricos, batentes e cames para estabelecer os pontos extremos de cada junta, sendo recomendada para tipos de programação mais sofisticados.
Está correto apenas o que se afirma em
Avalie as afirmações sobre as maneiras de programação de tais dispositivos.
I - Na programação por aprendizagem, o operador humano posiciona as juntas em configurações sequenciais da trajetória desejada, usando um dispositivo eletrônico, que pode ser um joystick. Essas configurações são armazenadas pelo robô e repetidas durante a execução.
II - Uma das desvantagens da programação por aprendizagem consiste na impossibilidade de executar o aprendizado com carga sendo transportada pelo efetuador do manipulador robótico.
III - Na programação por linguagem textual, o operador deve usar uma linguagem de programação, geralmente com termos de língua inglesa, visando codificar instruções no programa.
IV - A programação mecânica consiste em usar chaves fim-de-curso, contatores elétricos, batentes e cames para estabelecer os pontos extremos de cada junta, sendo recomendada para tipos de programação mais sofisticados.
Está correto apenas o que se afirma em
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081675
Engenharia de Automação
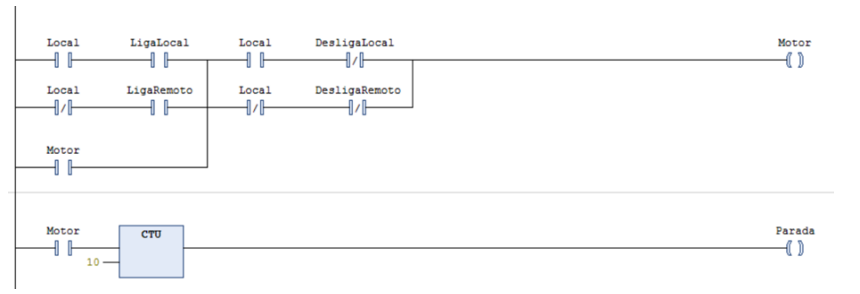
Considere o programa em Ladder apresentado a seguir.
É correto afirmar que assim que o
É correto afirmar que assim que o
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081673
Engenharia de Automação
Considerando-se o programa em Ladder apresentado a seguir, assinale o programa em Texto Estruturado cujo
comportamento mais se aproxima do comportamento do programa em Ladder.

Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081666
Engenharia de Automação
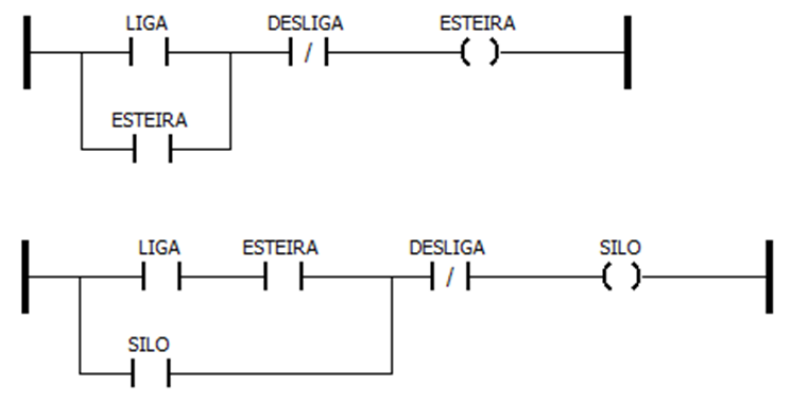
Considere o programa apresentado a seguir.
Sobre o seu funcionamento é correto afirmar que,
Sobre o seu funcionamento é correto afirmar que,
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103240
Engenharia de Automação
A Norma IEC 61131 define um padrão global para
programação de controle industrial.
Assinale a alternativa que apresenta linguagens definidas
por essa norma.
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103233
Engenharia de Automação
O sistema de numeração hexadecimal utiliza a base 16,
logo possui 16 símbolos possíveis.
Assinale a alternativa que apresenta o resultado
da conversão hexadecimal-decimal para o número
hexadecimal 8AF2.
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103231
Engenharia de Automação
O sistema decimal binário é o sistema de codificação
numérica mais importante em sistemas digitais.
Assinale a alternativa que apresenta o resultado da
conversão decimal-binário para o número decimal 25.
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262986
Engenharia de Automação
Atualmente todos os programas desenvolvidos para CLPs são elaborados a partir de linguagens de programação padronizadas.
Observe as afirmações a seguir.
I - Tais padronizações envolveram o desenvolvimento de normas visando atender os conhecimentos de: comandos elétricos, diagramas lógicos e representação matemática;
II - Tais padronizações envolveram a criação das normas ICE 1131-3 e IEC 5410 com o intuito de criar uma linguagem de programação padrão, que posteriormente fundiram-se para formar a atual IEC 61131-3
III - Tais padronizações envolveram o surgimento de representações contempladas pela IEC 61131-3 como: ladder, blocos de função e lista de instrução.
Podemos afirmar que dentre elas é(são) correta(s):
Observe as afirmações a seguir.
I - Tais padronizações envolveram o desenvolvimento de normas visando atender os conhecimentos de: comandos elétricos, diagramas lógicos e representação matemática;
II - Tais padronizações envolveram a criação das normas ICE 1131-3 e IEC 5410 com o intuito de criar uma linguagem de programação padrão, que posteriormente fundiram-se para formar a atual IEC 61131-3
III - Tais padronizações envolveram o surgimento de representações contempladas pela IEC 61131-3 como: ladder, blocos de função e lista de instrução.
Podemos afirmar que dentre elas é(são) correta(s):
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192338
Engenharia de Automação
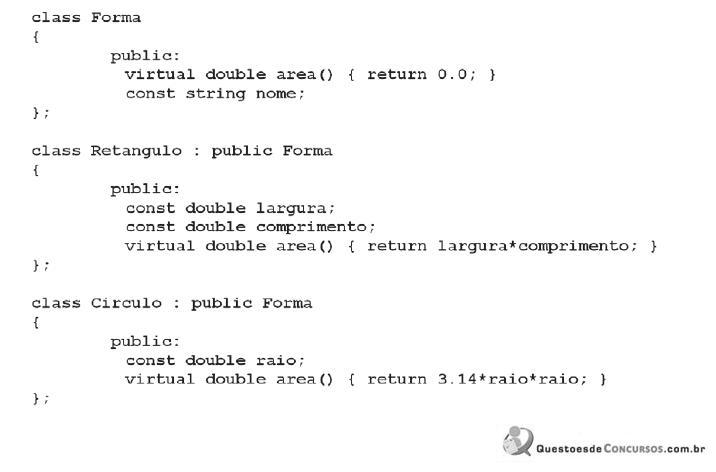
Considere as afirmações abaixo sobre o código em C++ apresentado acima.
I - As classes Retangulo e Circulo herdam a classe Forma.
II - O método “area” das classes Retangulo e Circulo sobrescreve o método de mesmo nome da classe ancestral (Forma) caso o objeto não seja instanciado diretamente da classe Forma.
III - O atributo “nome” é exclusivo da classe Forma e não existe nos objetos instanciados diretamente das classes Retangulo e Circulo.
IV - O atributo “raio” é exclusivo da classe Circulo e não existe nos objetos instanciados diretamente das classes Forma e Retangulo.
Estão corretas as afirmações
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192325
Engenharia de Automação
No projeto de um painel supervisório do qual faz parte um mostrador com dois displays de sete segmentos operados por varredura, o projetista investiga por que o mostrador exibe o valor 19 em uma situação na qual deveria exibir 15.
Navegando pelo código em C para o microcontrolador que comanda o painel, ele encontra o trecho responsável pela exibição. Nesse trecho, que utiliza funções nomeadas de forma autoexplicativa, ele encontra
Navegando pelo código em C para o microcontrolador que comanda o painel, ele encontra o trecho responsável pela exibição. Nesse trecho, que utiliza funções nomeadas de forma autoexplicativa, ele encontra
Ano: 2008
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2008 - Transpetro - Engenheiro Júnior - Automação |
Q113269
Engenharia de Automação

Foi desenvolvido um programa em LADDER para controle do sistema, mostrado parcialmente na Figura 2. A linha que completa corretamente o programa da Figura 2 é