Questões de Concurso
Sobre linguagens de programação para engenharia de automação em engenharia de automação
Foram encontradas 36 questões
A lógica desejada requer que o motor deve ser acionado quando o botão de partida (START) for pressionado e o botão de parada (STOP) não estiver acionado. Além disso, o motor deve permanecer ligado (auto-retenção) até que o botão STOP seja pressionado.
Assinale a opção que apresenta corretamente essa lógica, em conformidade com os princípios da programação.
Com base nessas informações, assinale a alternativa que descreve a operação do sistema.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
A linguagem Ladder permite a construção de circuitos utilizando-se fluxo reverso de corrente elétrica, com o mesmo esquemático do circuito elétrico que se pretende representar.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
Uma das dificuldades da utilização de um CLP é a impossibilidade de se realizar um temporizador para controlar a comutação de um contator.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
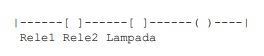
Em Ladder, para que uma lâmpada seja acesa quando um ou outro relé esteja acionado, o seguinte programa deve ser gravado em um CLP.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
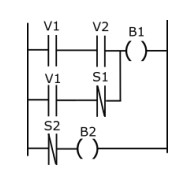
Para implementar uma ação de parada de emergência, o botão de desligar deve ter a seguinte simbologia em Ladder.

Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
A linguagem Ladder baseia-se na lógica de relés e de contatos elétricos para o projeto e a implementação de circuitos elétricos de acionamentos.
• Uma sirene que deve ser acionada somente após um atraso programado, evitando partidas imediatas.
• Um ventilador que deve continuar operando por alguns segundos após o desligamento do comando, para garantir a exaustão residual do ambiente.
Ao revisar o programa em Ladder, foi necessário distinguir o comportamento dos temporizadores empregados nessas duas etapas. Nesse caso, qual alternativa descreve corretamente a diferença principal entre um temporizador TON e um TOF?
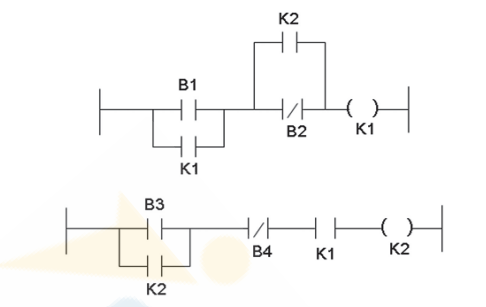
Observe o diagrama Ladder a seguir:
O tipo de circuito lógico representado correspondente a uma porta
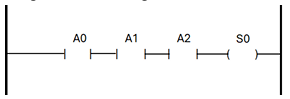
O trecho de programa seguinte implementa uma lógica de controle para a partida direta (simples) de um motor, implementada em linguagem Ladder.
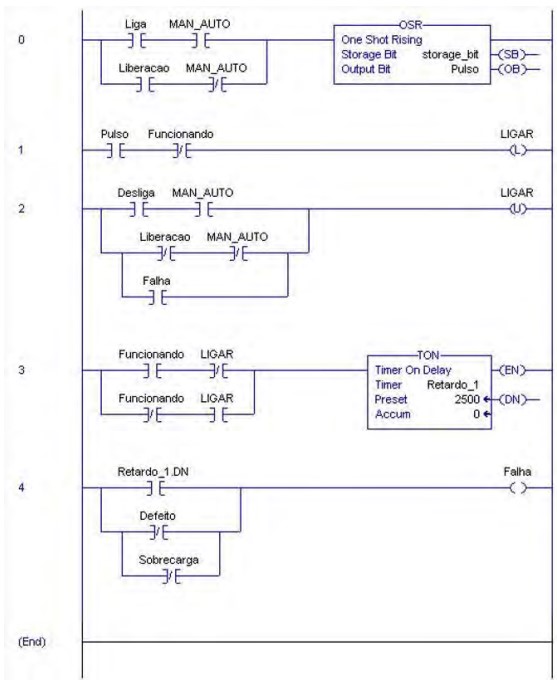
Neste programa o bloco OSR (One Shot Rising, na linha 0), implementa a detecção a bordas de subida. Ele faz com que sua saída OB (Output Bit, associada a variável Pulso) seja setada toda vez que sua entrada sofrer uma transição lógica ascendente. Nas demais condições, o bit de saída permanece em nível lógico baixo. Analise as afirmativas seguintes, referentes a este programa de partida direta de um motor:
I. Uma vez acionada a saída Ligar, o motor será desligado se, dentro de 2,5s não houver o retorno de que ele foi realmente ligado.
II. Se, após a saída Ligar ser acionada o sinal Funcionando sofrer uma transição lógica ascendente, o motor é desligado.
III. A realimentação do sinal Ligar em forma de contato de selo não é necessária uma vez que bobinas tipo Set (Latch - retentiva) e Reset (Unlatch – não retentiva) são usadas nas linhas 1 e 2 do programa para programar o ligamento/desligamento do motor.
IV. É possível usar a entrada Liberação para que, em modo automático, lógicas externas comandem o motor em função de, por exemplo, sequenciamento de equipamentos do processo.
Selecione a única opção que relaciona todas as afirmativas corretas.
Analise as afirmativas seguintes, referentes a características de Controladores Lógicos Programáveis – CLP’s:
I. Para garantir o atendimento às exigências de um sistema de tempo real o programa de controle deve monitorar regularmente os sinais de entrada provenientes do processo. Isto é garantido pela execução cíclica do programa em CLP’s num período denominado varredura (SCAN).
II. Depois do advento dos CLP’s os relés e os contatores tornaram-se dispensáveis à automação industrial, minimizando problemas de manutenção com desgastes mecânicos das partes móveis, ruídos e dissipação térmica associados a estes dispositivos.
III. Um passo na linguagem SFC representa um estado particular do sistema, recebe um nome único, só pode aparecer uma vez na rede SFC e pode possuir somente uma ação de controle associada a ele para descrever seu comportamento.
IV. Tanto funções como blocos funcionais são referidos como blocos, mas apenas os blocos funcionais possuem persistência de dados por meio da estrutura de dados criada quando instância é declarada.
Selecione a única opção que relaciona todas as afirmativas corretas.
A norma IEC61131, especificamente em sua seção 3, estabelece e normatiza as linguagens de programação empregadas em Controladores Lógicos Programáveis (CLPs). Levando em conta as aplicações e orientações para cada uma das linguagens especificadas na norma, é correto afirmar que:
Nesse cenário, deseja-se que o microcontrolador acesse um byte dessa memória.
Utilizando-se a notação 0x, qual é o maior endereço, em hexadecimal, para o microcontrolador realizar esse acesso?
Dado 1 kB = 1 kilobyte = 1024 bytes
Considere o trecho de código na linguagem C, descrito abaixo.
int Teste[5] = {4,2,10,4,5};
int SomaQ = 0;
int i;
for (i=0;i<5;i++) {
"código a ser incluído aqui"
} /* for */
Qual código deve ser incluído na linha indicada entre
aspas (" ") para que a variável SomaQ assuma o valor
da soma dos quadrados dos números contidos no vetor
Teste quando terminar o loop?
Uma dessas ferramentas destina-se ao controle do movimento e da velocidade de seus eixos ao longo de um processamento de uma peça.
A ferramenta citada é:
A seguinte caracterização NÃO descreve adequadamente um CLP: