Questões de Concurso
Para automação
Foram encontradas 726 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
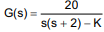
O valor do zero do compensador é de, aproximadamente:
Dado o circuito com as portas lógicas a seguir:
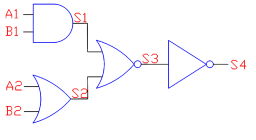
Admitindo-se que os sinais digitais presentes nas entradas sejam A1=0, B1=1, A2=1 e B2=1, quais serão os sinais digitais que teremos em S1, S2, S3 e S4, respectivamente?
Durante a elaboração de um projeto de automação foi levantada a seguinte equação lógica booleana, que corresponde ao funcionamento do equipamento:

Esta equação foi simplificada, sendo desenvolvido um circuito digital que representa esta automação. Identifique, dentre as alternativas a seguir, qual representa o circuito digital simplificado correto:
Qual o paradigma predominante no que diz respeito à prática de ensino utilizando a robótica?
Para a robótica, define-se um robô como um sistema não autônomo que existe no mundo físico e que pode agir sobre o ambiente em que se encontra para alcançar objetivos predeterminados.
A cinemática inversa procura analisar os incrementos de posição ao longo do tempo de cada um dos componentes do braço de um robô.
A transformação que descreve a relação entre a mão de um manipulador robótico e o referencial de origem também descreve as relações entre os elos intermediários do braço de um robô.
Os atuadores elétricos utilizados para movimentar as juntas de um robô possuem o inconveniente de gerar arcos elétricos.
I. O gozo de férias anuais remuneradas não é um direito dos trabalhadores urbanos e rurais.
II. As condições do mobiliário e dos equipamentos podem estar relacionadas a riscos à saúde e à segurança do trabalhador.
III. Um sistema de automação predial não permite proporcionar conforto e controle personalizado dos sistemas aos usuários da edificação.
Marque a alternativa CORRETA:
I. A empatia é a atitude do entendimento, da interação e da expressão facial e corporal.
II. Um sistema de automação predial não permite controlar e monitorar o consumo energético da edificação.
III. O desempenho do produto é um fator que não deve ser considerado no momento da escolha dos materiais elétricos.
Marque a alternativa CORRETA:
 .
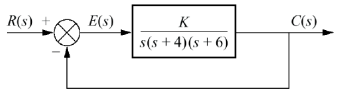
Para que esse sistema seja estável, o valor de K deverá ser:
.
Para que esse sistema seja estável, o valor de K deverá ser: Considere o circuito a seguir.
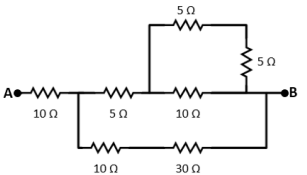
Assinale a alternativa que apresenta o valor para a
resistência equivalente entre os terminais A e B do
circuito.
Considere o circuito a seguir.
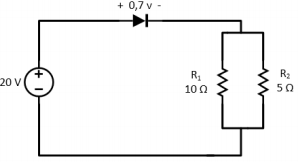
Os valores, em módulo, das correntes que circulam por
R1 e R2 são, respectivamente: