Foram encontradas 726 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
um manipulador multifuncional, controlado automaticamente, reprogramável, com três ou mais eixos, que pode estar fixo em determinado local ou ser móvel, utilizado em aplicações industriais.
Dentre os robôs industriais, os robôs articulados têm destaque. Eles podem ter vários eixos, todos rotativos. Para que o controlador do robô possa determinar as necessidades de posicionamento de cada braço ou elo, cada eixo possui um sensor que fornece informações para o controlador.
Dos sensores abaixo, qual é o utilizado nos robôs articulados?
Das situações abaixo, qual NÃO é adequada à utilização de válvula proporcional em operações de controle?
Considerando-se uma operação automatizada de torneamento, o programa de instruções
Alguns exemplos de Sistema de Manufatura são: células individuais, agrupamento de máquinas, linha de montagem manual, linha de transferência automatizada, sistema de montagem automatizado, células de máquinas, sistema de manufatura flexível, e outros.
A seguinte descrição representa um Sistema de Manufatura Flexível:
Entradas:
X0 = Botão retentivo de 2 posições, sendo, na posição 1, automático; na posição 2, manual.
X1 = Sensor S1
X2 = Sensor S2
X3 = Botão liga pulsante
X4 = Botão desliga pulsante
Nota: O botão retentivo na entrada X0 , na posição 1 (automático) emite um sinal na entrada. Se na posição 2 (manual) não emite sinal na entrada.
Saída: Y0 = Bomba d’água
O programa em Ladder instalado no CLP é o seguinte:
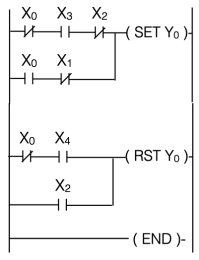
Analisando-se o programa, constata-se que o sistema em
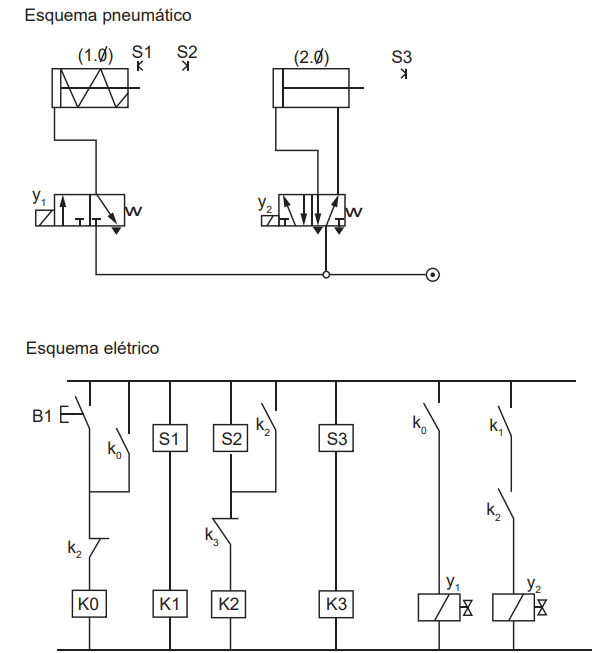
Pode-se apresentar o trajeto-passo de um circuito pneumático, escrevendo em sequência o número do atuador e o sinal + ou -, indicando avanço ou recuo respectivamente. Por exemplo: 1+ 2+ 1- 2- significa que o atuador 1 avança, em seguida o atuador 2 avança, em seguida o atuador 1 recua, e, finalmente, o atuador 2 recua.
Considerando-se os esquemas pneumático e elétrico acima, qual sequência de atuação é a correta, após acionamento do botão B1?
Aumentando-se o ganho proporcional do PI, o amortecimento da malha fechada
Considere o sistema de controle em malha fechada, dado pelo diagrama de blocos a seguir.
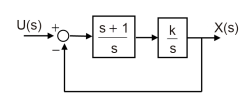
A função de transferência de malha fechada  é
é
Considere uma função de transferência de um controlador PID, realizável por um circuito ou sistema analógico, na forma de polos e zeros finitos dependentes dos ganhos proporcional, integral e derivativo.
Essa função é dada por
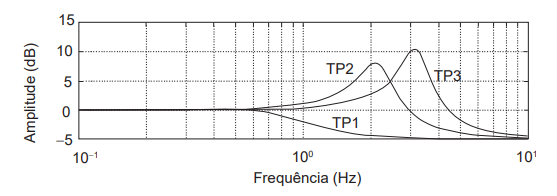
Considere que esse sistema será utilizado para medir sinais de pressão de pequena amplitude, com frequência em torno de 2 Hz.
Nesse caso, qual transdutor deverá ser utilizado?
Um técnico em instrumentação está orientando um estagiário. Durante a análise de um sinal de baixa frequência sobreposto com um ruído de alta frequência, o técnico questiona o estagiário sobre como poderia calcular a relação sinal/ruído (SNR) daquela medição. O estagiário responde que a SNR é uma relação entre as potências do sinal de baixa e de alta frequências que estão envolvidos no sinal medido.
Desse modo, para calcular a SNR da medição, o estagiário deve indicar a seguinte expressão matemática:
Dado
Vrms e VRrms são os valores RMS do sinal e do ruído
O que diferencia um servomecanismo de outros tipos de acionamentos em robótica?
Com base nessa observação, qual alteração no controlador PID poderia corrigir esse comportamento?
• No estado S0: com entrada 1, vai para S1; com entrada 0, permanece em S0.
• No estado S1: com entrada 1, vai para S2; com entrada 0, volta para S0.
• No estado S2: com entrada 1, retorna para S1; com entrada 0, vai para S3.
• No estado S3: independente da entrada, retorna para S0.
Se o robô começa no estado S0 e recebe as entradas: 1, 1, 0, qual será o estado final?
Julgue o item subsequente, relativo aos conceitos de conformidade e automação de TI: Puppet, Ansible.
O Ansible é uma solução de software que permite controlar
um dispositivo, através de agentes nele instalados, a partir de
um local diferente, sendo que a comunicação entre o servidor
e o dispositivo ocorre por meio dos referidos agentes.