Foram encontradas 186 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Sobre o sistema dinâmico representado pela função H(s) descrita a seguir, pode-se afirmar:
Assinale a alternativa que representa a frequência mínima de amostragem para um conversor analógicodigital, segundo o teorema de Nyquist.

Considerando essas informações, determine, respectivamente, o valor da tensão média sobre o resistor de carga e a tensão reversa máxima sobre um diodo da ponte retificadora.

Considerando o circuito representado na figura a seguir, assinale a alternativa correta.




Uma instalação de 220 V/60 Hz possui dois motores iguais de 12 kW com fator de potência 0,8 (indutivo).
Considerando que no mesmo barramento dos motores foi instalado um banco de capacitores de 11kVAr capacitivo, e desconsiderando outras cargas, qual será o fator de potência total do conjunto?

Assinale a alternativa correta a respeito do circuito representado na figura seguinte:

Cabe ao docente ocupante de cargo no magistério público federal observar a legislação que rege sua carreira na categoria funcional de professor do ensino básico, técnico e tecnológico e a que disciplina sua atuação na administração pública. Tendo como base as normativas para o Servidor Público Federal, analise as proposições e julgue se são verdadeiras ou falsas.
I. Exercer com zelo e dedicação as atribuições do cargo, ser leal às instituições a que servir, observar as normas legais e regulamentares, atender com presteza ao público em geral, prestando as informações requeridas, ressalvadas as protegidas por sigilo, são deveres do servidor público expressamente previstos no Decreto nº 1.171, de 22 de junho de 1994.
II. Manter conduta compatível com a moralidade administrativa, ser assíduo e comunicar aos seus superiores irregularidades ou atos contrários ao interesse público são obrigações do servidor público, no que se refere à observância da Lei 8.112/90 e do Código de Ética Profissional do Servidor Público Civil do Poder Executivo Federal, aprovado pelo decreto 1.171/94.
III. Por motivo de crença religiosa ou de convicção filosófica ou política, o servidor não poderá ser privado de quaisquer dos seus direitos, sofrer discriminação em sua vida funcional, nem eximir-se do cumprimento de seus deveres.
IV. A Carreira de Magistério do Ensino Básico, Técnico e Tecnológico destina-se a profissionais habilitados em atividades acadêmicas próprias do pessoal docente no âmbito da educação básica e da educação profissional e tecnológica.
V. O desenvolvimento na Carreira de Magistério do Ensino Básico, Técnico e Tecnológico ocorrerá mediante progressão funcional e promoção, compreendendo-se a promoção como sendo a passagem do servidor para o nível de vencimento imediatamente superior dentro de uma mesma classe, e progressão, a passagem do servidor de uma classe para outra subsequente.
Assinale a alternativa correta:
Analise as alternativas a seguir, com referências ao Programa Nacional de Integração da Educação Profissional com a Educação Básica na Modalidade de Educação de Jovens e Adultos – PROEJA, e assinale a alternativa correta:
I. Os cursos e programas do PROEJA deverão considerar as características dos jovens e adultos atendidos e poderão ser articulados à formação inicial e continuada de trabalhadores ou à educação profissional técnica e tecnológica.
II. Os cursos e programas de formação inicial e continuada de trabalhadores articular-se-ão, preferencialmente, com os cursos de educação de jovens e adultos, objetivando a qualificação para o trabalho e a elevação do nível de escolaridade do trabalhador, o qual, após a conclusão com aproveitamento dos referidos cursos, fará jus a certificados de formação inicial ou continuada para o trabalho.
III. Todos os cursos e programas do PROEJA devem prever a possibilidade de conclusão a qualquer tempo, desde que demonstrado aproveitamento e atingidos os objetivos desse nível de ensino, mediante avaliação e reconhecimento por parte da respectiva instituição de ensino.
IV. Os cursos de educação profissional técnica de nível médio do PROEJA deverão contar com carga horária mínima de duas mil e quatrocentas horas, assegurando-se a observância às diretrizes curriculares nacionais e demais atos normativos do Conselho Nacional de Educação para a educação profissional técnica de nível médio, para o ensino fundamental, para o ensino médio e para a educação de jovens e adultos.
De acordo com a Resolução CNE/CEB nº 6 de 20 de setembro de 2012, a Educação Profissional Técnica de Nível Médio poderá ser desenvolvida nas seguintes formas:
Assinale a alternativa INCORRETA em relação aos TERMOPARES.
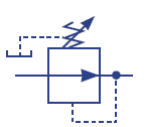
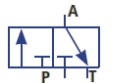
Assinale a alternativa CORRETA em relação a simbologia abaixo.
Assinale a alternativa INCORRETA em relação ao fluido hidráulico.
Os ambientes industriais são classificados de acordo com determinados parâmetros de agressividade do meio. Esses parâmetros são muito importantes, pois ajudam os fabricantes a testar seus produtos e os projetistas a informar qual a necessidade para cada equipamento em cada ambiente em que será instalado. Assinale a alternativa CORRETA para um equipamento com classificação IP65.
Assinale a alternativa INCORRETA em relação aos Sistemas Digitais de Controle Distribuído — SDCD.