Questões de Concurso Público UFSC 2023 para Tecnólogo/Mecatrônica Industrial
Foram encontradas 50 questões
Q2166830
Mecatrônica
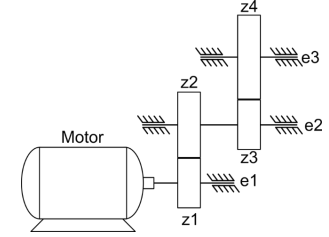
O esquema mecânico abaixo apresenta um motor elétrico e quatro engrenagens. No eixo e1 do
motor, encontra-se montada a primeira engrenagem, com número de dentes z1 = 18. A primeira
engrenagem está acoplada a uma segunda engrenagem, montada no eixo e2, com número de
dentes z2 = 36. No mesmo eixo e2, também está montada uma terceira engrenagem, com número
de dentes z3 = 14. A terceira engrenagem está acoplada a uma quarta engrenagem montada no
eixo e3, com número de dentes z4 = 56. Considere que os eixos e1, e2 e e3 são perfeitamente
paralelos e não sofrem atritos em seus mancais de montagem. Seja a velocidade angular de
rotação de saída do motor sobre o eixo e1 definida como ω1 e as velocidades angulares sobre os
eixos e2 e e3 definidas por ω2 e ω3, respectivamente. Também considere o torque de saída do
motor sobre o eixo e1 definido como T1 e os torques resultantes nos eixos e2 e e3 definidos,
respectivamente, por T2 e T3.
Considere as seguintes equações de acoplamento de duas engrenagens:
a) i = zs/ze ; b) ωe/ωs = i ; c) Te/Ts = 1/i ;
onde i é a relação de transmissão, zs é o número de dentes da engrenagem de saída, ze é o número de dentes da engrenagem de entrada, ωs é a velocidade angular na engrenagem de saída, ωe é a velocidade angular da engrenagem de entrada, Ts é o torque sobre o eixo da engrenagem de saída e Te é o torque sobre o eixo da engrenagem de entrada.
Para um dado valor de velocidade angular ω1 e torque T1 gerados pelo motor sobre e1, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) A velocidade angular resultante sobre e2 é a metade da velocidade angular sobre e1. ( ) A velocidade angular sobre e3 é 1/2 da velocidade angular sobre o eixo e2. ( ) O torque sobre o eixo e3 é duas vezes maior do torque sobre eixo e2. ( ) A relação de transmissão entre os eixos e3 e e1 é i = 4. ( ) Ao diminuir o número de dentes da primeira engrenagem para z1 = 12, a relação de transmissão entre os eixos e1 e e3 é amplificada para 12.
Considere as seguintes equações de acoplamento de duas engrenagens:
a) i = zs/ze ; b) ωe/ωs = i ; c) Te/Ts = 1/i ;
onde i é a relação de transmissão, zs é o número de dentes da engrenagem de saída, ze é o número de dentes da engrenagem de entrada, ωs é a velocidade angular na engrenagem de saída, ωe é a velocidade angular da engrenagem de entrada, Ts é o torque sobre o eixo da engrenagem de saída e Te é o torque sobre o eixo da engrenagem de entrada.
Para um dado valor de velocidade angular ω1 e torque T1 gerados pelo motor sobre e1, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) A velocidade angular resultante sobre e2 é a metade da velocidade angular sobre e1. ( ) A velocidade angular sobre e3 é 1/2 da velocidade angular sobre o eixo e2. ( ) O torque sobre o eixo e3 é duas vezes maior do torque sobre eixo e2. ( ) A relação de transmissão entre os eixos e3 e e1 é i = 4. ( ) Ao diminuir o número de dentes da primeira engrenagem para z1 = 12, a relação de transmissão entre os eixos e1 e e3 é amplificada para 12.
Q2166831
Mecatrônica
Considerando os vários processos de fabricação existentes e suas respectivas características e
aplicações, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a
alternativa com a sequência correta de cima para baixo.
( ) No processo de conformação mecânica por calandragem predominam os esforços de flexão quando comparado aos processos de forjamento e laminação.
( ) Existem três processos de fabricação para a união permanente de materiais: colagem, brasagem e soldagem.
( ) No processo de soldagem MIG, o gás de proteção participa de alterações metalúrgicas da poça de fusão.
( ) Furação não é um tipo de usinagem.
( ) No processo de conformação mecânica por calandragem predominam os esforços de flexão quando comparado aos processos de forjamento e laminação.
( ) Existem três processos de fabricação para a união permanente de materiais: colagem, brasagem e soldagem.
( ) No processo de soldagem MIG, o gás de proteção participa de alterações metalúrgicas da poça de fusão.
( ) Furação não é um tipo de usinagem.
Q2166832
Mecatrônica
CAPP (planejamento de processo auxiliado por computador, do inglês Computer-Aided Process
Planning) e CAM (manufatura auxiliada por computador, do inglês Computer-Aided Manufacturing)
consistem no planejamento e na preparação das instruções de operação detalhadas para
transformar um desenho de engenharia em produto final. Com relação ao CAPP e ao CAM,
indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a
sequência correta de cima para baixo.
( ) O CAPP tem por base três formas de planejamento do trabalho: variante, automático e generativo.
( ) O CAPP tem as seguintes etapas básicas: sequenciamento de operações; determinação do maquinário e ferramentas aplicáveis; lubrificação de peças; definição das condições de processo e respectivos tempos de fabricação.
( ) O CAM pode ser classificado em duas grandes categorias, de acordo com o sistema computacional: sistemas computadorizados de controle e monitoração e sistemas de suporte da produção.
( ) Sistemas como MRP e programação CNC são exemplos de CAM.
( ) Na forma variante de CAPP, as peças são classificadas de acordo com semelhanças de caráter geométrico ou de utilidade.
( ) O CAPP tem por base três formas de planejamento do trabalho: variante, automático e generativo.
( ) O CAPP tem as seguintes etapas básicas: sequenciamento de operações; determinação do maquinário e ferramentas aplicáveis; lubrificação de peças; definição das condições de processo e respectivos tempos de fabricação.
( ) O CAM pode ser classificado em duas grandes categorias, de acordo com o sistema computacional: sistemas computadorizados de controle e monitoração e sistemas de suporte da produção.
( ) Sistemas como MRP e programação CNC são exemplos de CAM.
( ) Na forma variante de CAPP, as peças são classificadas de acordo com semelhanças de caráter geométrico ou de utilidade.
Q2166833
Mecatrônica
Entre os vários aspectos a serem considerados na especificação de um robô, é importante definir o
seu número de graus de liberdade. Com relação a esse assunto, é correto afirmar que:
Q2166834
Mecatrônica
A figura abaixo apresenta um robô definido no espaço plano com cadeia cinemática do tipo RRP,
sendo que R representa uma junta de revolução e P representa uma junta do tipo prismática.
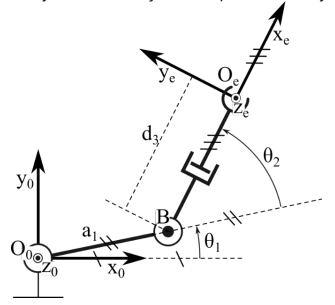
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo θ1, medido entre o eixo x0 e a reta definida pelos pontos O0 e B, sobre o elo a1. A segunda junta de revolução tem eixo de rotação paralelo ao eixo da primeira junta de revolução, ou seja, na direção e sentido de z0, mas passando pelo ponto B, com deslocamento de junta definido pelo ângulo θ2, medido entre a reta definida entre os pontos O0 e B (alongamento tracejado na figura) e a reta definida entre os pontos B e a origem Oe. A terceira junta prismática tem seu eixo na direção e sentido do eixo xe (eixo x do sistema de coordenadas do efetuador) definido pela relação
xe = Oe − B / ‖Oe − B‖
passando pelo ponto B, com deslocamento d3, correspondente à distância entre os pontos B e Oe. Com respeito ao robô RRP, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Não é possível gerar movimento de deslocamento para o efetuador do robô RRP na direção de z0. ( ) O robô RRP possui quatro graus de mobilidade. ( ) O volume de trabalho do robô RRP é cilíndrico. ( ) O robô RRP não possui singularidades.
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo θ1, medido entre o eixo x0 e a reta definida pelos pontos O0 e B, sobre o elo a1. A segunda junta de revolução tem eixo de rotação paralelo ao eixo da primeira junta de revolução, ou seja, na direção e sentido de z0, mas passando pelo ponto B, com deslocamento de junta definido pelo ângulo θ2, medido entre a reta definida entre os pontos O0 e B (alongamento tracejado na figura) e a reta definida entre os pontos B e a origem Oe. A terceira junta prismática tem seu eixo na direção e sentido do eixo xe (eixo x do sistema de coordenadas do efetuador) definido pela relação
xe = Oe − B / ‖Oe − B‖
passando pelo ponto B, com deslocamento d3, correspondente à distância entre os pontos B e Oe. Com respeito ao robô RRP, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Não é possível gerar movimento de deslocamento para o efetuador do robô RRP na direção de z0. ( ) O robô RRP possui quatro graus de mobilidade. ( ) O volume de trabalho do robô RRP é cilíndrico. ( ) O robô RRP não possui singularidades.