A figura abaixo apresenta um robô definido no espaço plano c...
Próximas questões
Com base no mesmo assunto
Q2166834
Mecatrônica
A figura abaixo apresenta um robô definido no espaço plano com cadeia cinemática do tipo RRP,
sendo que R representa uma junta de revolução e P representa uma junta do tipo prismática.
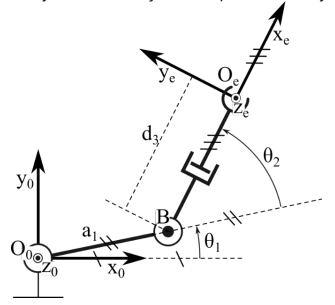
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo θ1, medido entre o eixo x0 e a reta definida pelos pontos O0 e B, sobre o elo a1. A segunda junta de revolução tem eixo de rotação paralelo ao eixo da primeira junta de revolução, ou seja, na direção e sentido de z0, mas passando pelo ponto B, com deslocamento de junta definido pelo ângulo θ2, medido entre a reta definida entre os pontos O0 e B (alongamento tracejado na figura) e a reta definida entre os pontos B e a origem Oe. A terceira junta prismática tem seu eixo na direção e sentido do eixo xe (eixo x do sistema de coordenadas do efetuador) definido pela relação
xe = Oe − B / ‖Oe − B‖
passando pelo ponto B, com deslocamento d3, correspondente à distância entre os pontos B e Oe. Com respeito ao robô RRP, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Não é possível gerar movimento de deslocamento para o efetuador do robô RRP na direção de z0. ( ) O robô RRP possui quatro graus de mobilidade. ( ) O volume de trabalho do robô RRP é cilíndrico. ( ) O robô RRP não possui singularidades.
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo θ1, medido entre o eixo x0 e a reta definida pelos pontos O0 e B, sobre o elo a1. A segunda junta de revolução tem eixo de rotação paralelo ao eixo da primeira junta de revolução, ou seja, na direção e sentido de z0, mas passando pelo ponto B, com deslocamento de junta definido pelo ângulo θ2, medido entre a reta definida entre os pontos O0 e B (alongamento tracejado na figura) e a reta definida entre os pontos B e a origem Oe. A terceira junta prismática tem seu eixo na direção e sentido do eixo xe (eixo x do sistema de coordenadas do efetuador) definido pela relação
xe = Oe − B / ‖Oe − B‖
passando pelo ponto B, com deslocamento d3, correspondente à distância entre os pontos B e Oe. Com respeito ao robô RRP, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Não é possível gerar movimento de deslocamento para o efetuador do robô RRP na direção de z0. ( ) O robô RRP possui quatro graus de mobilidade. ( ) O volume de trabalho do robô RRP é cilíndrico. ( ) O robô RRP não possui singularidades.