Questões de Concurso
Sobre mecânica em engenharia mecatrônica
Foram encontradas 98 questões
Em relação aos instrumentos de medida, pode-se afirmar que:
I. O vetor de entrada na condição de linearização não pode ser variável no tempo.
II. A condição de linearização deve satisfazer as equações de estado.
III. A condição de linearização deve ser um ponto de equilíbrio do sistema.
Está correto o que se apresenta em
G(s) = - k0 / T.s + 1 A resposta em frequência dessa função mostra que a defasagem da saída em relação à entrada, para baixas frequências (ω << 1/T) e para altas frequências (ω >> 1/T), são respectivamente iguais a
A figura a seguir apresenta um diagrama em blocos de um
sistema.
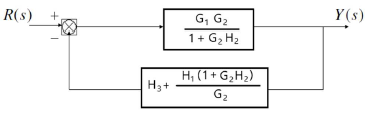 A função de transferência desse sistema é apresentada em
A função de transferência desse sistema é apresentada emUm manômetro é um instrumento utilizado para medir a Pressão dos Fluidos. A respeito do conceito de Pressão, assinale a alternativa incorreta.
Leia o seguinte excerto a respeito do conceito Sistemas de Controle de Malha Fechada.
“Os sistemas de controle com realimentação são, com frequência, denominados também sistemas de controle de malha fechada. Em um sistema de controle de malha fechada, o sinal de ______, que é a diferença entre o sinal de entrada e o sinal de realimentação (que pode ser o próprio sinal de saída ou uma função do sinal de saída e suas derivadas e/ou integrais), _______o controlador, de modo a _______o erro e________ a saída do sistema ao valor desejado” (OGATA, 2010)
Assinale a alternativa que preencha correta e respectivamente as lacunas.
Com relação a elementos de máquinas presentes em sistemas de movimentação linear, marque (V) para as afirmativas verdadeiras e (F), para as falsas.
( ) Mancais do tipo apoio são empregados na extremidade de fusos de esfera para permitir deslocamentos axiais, como por exemplo, os efeitos de dilatação térmica de diferentes materiais empregados em sistemas de movimentação linear.
( ) Fusos de esfera longos e esbeltos não estão sujeitos ao fenômeno de velocidade crítica quando tendem a girar sobre seu próprio eixo alcançando amplitudes perigosas e tendência de vibração.
( ) Contraporca é um elemento empregado na extremidade de um eixo para fixá-lo de um lado evitando seu deslocamento radial.
( ) Acoplamentos flexíveis são projetados para transmitir torque de maneira suave e permitir certo desalinhamento axial, radial e angular.
( ) Quando utilizados acoplamentos rígidos, a falha prematura por cisalhamento poderá ser induzida nos eixos caso o alinhamento não puder ser mantido com precisão.
( ) Os rolamentos lineares de esferas recirculantes são componentes mecânicos utilizados para montar sistemas de movimentação linear simples e econômicos para uma grande variedade de aplicações mecatrônicas.
Assinale a alternativa que contém a sequência CORRETA de cima para baixo.
Ao acionar um sinal de entrada degrau unitário, observa-se a curva de resposta em malha aberta de um sistema conforme a figura:
Pode-se dizer que:
Dadas as funções:
I. F(s) = 3/(s+2)
II. G(s) = (s+3)/(s-2)
III. H(s) = (s-2)/(s2+2s+4)
IV. J(s) = 7/(s2+3s+5)
V. M(s) = (5s+1)/(s2-2s+1)
Pode-se dizer que são exemplos de funções de transferência de processos estáveis frente a um sinal de entrada degrau:
O torque necessário para o acionamento de fusos de esfera em sistemas de movimentação linear, como o representado na figura abaixo, é dado por:
(desprezando-se a pré-carga da castanha e o torque de resistência do rolamento).
Calcule o torque de acionamento necessário, considerando: o peso total (W1+W2) igual a 1kN; coeficiente de atrito das guias igual a 0,003 e fuso com: diâmetro de 33 mm, avanço de 10 mm e eficiência de 96%.
Fonte: adaptado do catálogo “Linear Motion– NSK”.
Dado um controlador PID (Proporcional-Integral-Derivativo), cuja função de transferência é dada por: C(s)=Kp+Ki/s+Kd.s
Observa-se no ajuste dos parâmetros Kp, Ki, Kd do controlador que:
I. Ao acionar a ação integradora (Ki > 0) garante-se resposta com erro nulo em regime permanente, independente da magnitude de Ki.
II. Ao aumentar o valor da ação proporcional (Kp), consegue-se estabilizar o sistema, reduzindo possíveis oscilações na resposta.
III. A ação derivativa (Kd) pode ser acionada para corrigir o erro em regime permanente, sem conseguir zerá-lo.
Sobre as afirmações acima, pode-se dizer que:
Considere o manipulador planar representado na figura abaixo. D e θ representam as variáveis de junta prismática e rotacional, respectivamente. A posição do efetuador final, montado na extremidade do elo 2 é definida pelo ponto P( x , y) .
Assinale a alternativa que representa o conjunto de equações referentes às coordenadas do ponto P( x , y) , determinadas em relação ao sistema de referência cartesiano Ox y .
Com relação aos elementos de máquinas, numere corretamente a coluna da direita de acordo com o texto correspondente à coluna da esquerda:
(1) Utilizada na transmissão de movimento entre eixos perpendiculares entre si.
(2) Podem ser de tração, de compressão, de fita, e de torção.
(3) Também conhecida como meia-lua ou de disco.
(4) Sua função é manter fixo ou limitar movimento axial entre um eixo e outras peças numa montagem
(5) Transmitem o torque necessário e posicionam concêntrica a ferramenta, com relação ao fuso da máquina.
(6) Aplicação muito recomendada em máquinas ou equipamentos que funcionam sob vibrações constantes e/ou intermitentes.
( ) Chaveta woodruff
( ) Anel de retenção
( ) Mola mecânica
( ) Arruela de pressão
( ) Engrenagem cônica
( ) Porta-ferramenta
A ordem CORRETA de associação, de cima para baixo, é:
Equipamentos e/ou dispositivos mecatrônicos utilizam sistemas de transmissão de movimento e potência. Das alternativas apresentadas abaixo, assinale a que cita apenas exemplos de sistemas de transmissão de movimento e potência utilizados em equipamentos mecatrônicos:
De acordo com a figura abaixo, é CORRETO afirmar:
Com referência à rugosidade e tolerâncias geométricas da peça abaixo, assinale a afirmativa CORRETA.
I. Os principais componentes desse sistema são: motor, cilindro, bomba de óleo, válvula e tanque de óleo. A bomba de óleo é responsável pelo fluxo de óleo no cilindro em direção ao pistão que movimenta a junta. II. É geralmente associado a robôs de maior porte, quando comparados aos acionadores pneumáticos e elétricos. Entretanto, a precisão em relação aos acionadores elétricos é menor. III. Existem diversos tipos diferentes de motores hidráulicos, como motor de palheta, de engrenagem, de lóbulos etc., e todos eles apresentam características de alto torque específico, ou seja, torque elevado com massa e volume reduzidos.
É correto o que se afirma em
( ) Elementos compridos e esbeltos sujeitos a uma força axial de compressão são chamados de flambagem e a deflexão lateral que sofrem é chamada de coluna.
( ) A carga axial máxima que uma coluna pode suportar e que está na iminência de sofrer flambagem é denominada carga crítica.
( ) Com muita frequência, a flambagem de uma coluna pode resultar em uma falha repentina e dramática de uma estrutura ou mecanismo e, por isso, é preciso dedicar especial atenção ao projeto de colunas para que estas possam suportar com segurança as cargas pretendidas sem sofrer flambagem.