Questões de Concurso
Sobre lógica de programação em engenharia mecatrônica
Foram encontradas 19 questões
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975124
Engenharia Mecatrônica
Considere o procedimento recursivo abaixo, chamado com
n ≥ 0:
função F(n): se n = 0, retorna 1 senão retorna F(n − 1) + 1
Para esse procedimento, o número de chamadas recursivas, incluindo a chamada inicial, e a profundidade máxima da pilha, em função de n, são, respectivamente:
função F(n): se n = 0, retorna 1 senão retorna F(n − 1) + 1
Para esse procedimento, o número de chamadas recursivas, incluindo a chamada inicial, e a profundidade máxima da pilha, em função de n, são, respectivamente:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975120
Engenharia Mecatrônica
Um sistema amostrado (controle digital) em malha fechada
com realimentação unitária possui planta discreta G(z) = 0,4/(z −
0,6) e compensador digital do tipo PI (Proporcional–Integral) na
forma C(z) = K·(z − 0,2)/(z − 1), obtido por aproximação Z/S. Para
K real, a equação característica do sistema em malha fechada é:
z² + (−1,6 + 0,4K)·z + (0,6 − 0,08K) = 0
Para um polinômio de 2ª ordem z² + a1 ·z + a0 , a estabilidade no domínio Z (polos dentro do círculo unitário) pode ser verificada pelo critério de Jury: |a0 | < 1, 1 + a1 + a0 > 0 e 1 − a1 + a0 > 0. O intervalo de K que garante estabilidade é:
z² + (−1,6 + 0,4K)·z + (0,6 − 0,08K) = 0
Para um polinômio de 2ª ordem z² + a1 ·z + a0 , a estabilidade no domínio Z (polos dentro do círculo unitário) pode ser verificada pelo critério de Jury: |a0 | < 1, 1 + a1 + a0 > 0 e 1 − a1 + a0 > 0. O intervalo de K que garante estabilidade é:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975114
Engenharia Mecatrônica
Deseja-se implementar um mecanismo de navegação “voltar”
e “avançar” em um software, no qual cada clique em uma página
mantém um histórico da página atual e permite retornar ao estado
anterior. Nesse cenário, a estrutura de dados mais adequada e o
custo assintótico típico das operações inserir/remover (push/pop),
são, respectivamente:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975112
Engenharia Mecatrônica
Considere um sistema em malha fechada com realimentação
unitária e função de malha aberta
L(s) = G(s) H(s)
Admita que L(s) não possui polos no semiplano direito (P = 0). A partir do diagrama de Bode de L(jω), foram obtidas as seguintes informações:
na frequência de cruzamento de ganho ωgc (onde |L(jωgc)| = 0 dB), a fase é L(jωgc) ≈ −150o
L(jωgc) ≈ −150o
na frequência de cruzamento de fase ωpc (onde L(jωpc) = −180o
),
o módulo é |L(jωpc)| ≈ −8 dB
Com base no método de Nyquist/Bode, esse sistema é:
L(s) = G(s) H(s)
Admita que L(s) não possui polos no semiplano direito (P = 0). A partir do diagrama de Bode de L(jω), foram obtidas as seguintes informações:
na frequência de cruzamento de ganho ωgc (onde |L(jωgc)| = 0 dB), a fase é
L(jωgc) ≈ −150o na frequência de cruzamento de fase ωpc (onde
L(jωpc) = −180o
),
o módulo é |L(jωpc)| ≈ −8 dB Com base no método de Nyquist/Bode, esse sistema é:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975110
Engenharia Mecatrônica
Considere um algoritmo de busca em um vetor ordenado
de tamanho n. No melhor caso, o elemento procurado está
exatamente na primeira posição testada. No pior caso, o algoritmo
realiza sucessivas divisões do intervalo de busca, até restar
apenas um elemento. A complexidade assintótica (Big-O) do
melhor caso e do pior caso, respectivamente, é:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975105
Engenharia Mecatrônica
Considere o sistema em malha fechada com realimentação
unitária e planta:
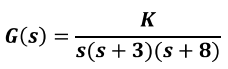
Deseja-se que o lugar geométrico das raízes (LGR) passe pelo polo dominante de projeto . Adote as seguintes
aproximações quando necessárias:
. Adote as seguintes
aproximações quando necessárias:
arctan(5,5 / 4) = 54o ;
arctan(5,5) = 80o ;
arctan(5,5 / 2,5) = 66o ;
arctan(5,5 / 21) = 15o .
Um compensador de avanço em série do tipo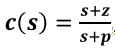 com z<p, que satisfaz a condição de ângulo no ponto Sd é:
com z<p, que satisfaz a condição de ângulo no ponto Sd é:
Deseja-se que o lugar geométrico das raízes (LGR) passe pelo polo dominante de projeto
. Adote as seguintes
aproximações quando necessárias: arctan(5,5 / 4) = 54o ;
arctan(5,5) = 80o ;
arctan(5,5 / 2,5) = 66o ;
arctan(5,5 / 21) = 15o .
Um compensador de avanço em série do tipo
com z<p, que satisfaz a condição de ângulo no ponto Sd é:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975104
Engenharia Mecatrônica
Em um sistema embarcado, é necessário ordenar n registros
em memória para permitir buscas rápidas. O projeto impõe pouca
memória adicional (ordenação in-place) e exige garantia de tempo
O(n log n) no pior caso. O par (ordenação + busca) que melhor
atende a essas restrições é:
Ano: 2025
Banca:
CESPE / CEBRASPE
Órgão:
EMBRAPA
Provas:
CESPE / CEBRASPE - 2025 - EMBRAPA - Pesquisador – Área: Engenharias – Subárea: Automação e Mecanização
|
CESPE / CEBRASPE - 2025 - EMBRAPA - Pesquisador – Área: Engenharias – Subárea: Recursos Florestais e Engenharia Florestal |
CESPE / CEBRASPE - 2025 - EMBRAPA - Pesquisador – Área: Engenharias – Subárea: Robótica e Sensoriamento |
Q3313436
Engenharia Mecatrônica
Em relação a métodos de controle para manipuladores robóticos, julgue o item a seguir.
Por ser uma linguagem de programação de baixo nível, o Python é usado para interação direta com o hardware eletrônico de controle de sistemas robóticos.
Ano: 2024
Banca:
IBFC
Órgão:
IMBEL
Prova:
IBFC - 2024 - IMBEL - Engenheiro - Engenheiro em Mecatrônica |
Q2440001
Engenharia Mecatrônica
Um programador está recebendo um relatório de erro, onde uma determinada posição de memória está com erro. Na mensagem o sistema apresenta o endereço (BCF32)16. Se o programador necessitar entender o endereço em octal, por razões de projeto, ele terá que convertê-lo.
Assinale a alternativa que corresponda o endereço dado no formato octal.
Ano: 2024
Banca:
IBFC
Órgão:
IMBEL
Prova:
IBFC - 2024 - IMBEL - Engenheiro - Engenheiro em Mecatrônica |
Q2440000
Engenharia Mecatrônica
Um determinado processo em máquina binária está somando os números binários (10100100)2 com (00111001)2. No final da operação aritmética, o processo deve apresentar o complemento de 2 da soma, porém, na base hexadecimal. Assinale a alternativa que apresenta corretamente o que será exibido.
Ano: 2024
Banca:
IBFC
Órgão:
IMBEL
Prova:
IBFC - 2024 - IMBEL - Engenheiro - Engenheiro em Mecatrônica |
Q2439989
Engenharia Mecatrônica
A árvore ______ é construída a partir da árvore binária de prefixo. Seja um conjunto de chaves {s1, …, sn} de valores binários tais que nenhuma chave seja prefixo de outra. Considere a árvore binária de prefixo correspondente a essas chaves apresentada na figura a seguir. Sabendo que as chaves válidas se encontram nas folhas da árvore, e admitindose de início, que a chave procurada z seja uma chave sempre válida. Agora o processo em questão é buscar a chave z = s4 na árvore. A partir do valor binário de z, o algoritmo percorrerá o caminho 11100 na árvore, iniciando pela raiz. Se z é uma chave válida, após se assegurar de que os dois primeiros dígitos de z são 11 não há alternativa para os dois seguintes, pois correspondem a nós com um único filho. Então, neste caso, a busca poderia eliminar o terceiro e o quarto teste de dígitos, pois, certamente será produzido 10. Em outras palavras, do segundo dígito da chave poderia se prosseguir diretamente para o quinto.

Assinale a alternativa que preencha corretamente a lacuna do texto acima .
Assinale a alternativa que preencha corretamente a lacuna do texto acima .
Ano: 2024
Banca:
IBFC
Órgão:
IMBEL
Prova:
IBFC - 2024 - IMBEL - Engenheiro - Engenheiro em Mecatrônica |
Q2439988
Engenharia Mecatrônica
Avalie a estrutura do algoritmo a seguir a assinale a alternativa que corresponda ao método de ordenação.

Ano: 2022
Banca:
FURB
Órgão:
Prefeitura de Blumenau - SC
Prova:
FURB - 2022 - Prefeitura de Blumenau - SC - Professor de Informática |
Q4082158
Engenharia Mecatrônica
A robótica educacional costuma empregar uma
abordagem multidisciplinar, podendo incluir matérias fora
do campo de Exatas. A unidade robótica é formada a
partir de quatro etapas e sistemas, estudados por
disciplinas relacionadas à Matemática e à Física.
Relacione a segunda coluna, de acordo com a primeira
que associa tópicos da Robótica Educacional às suas
definições e/ou características:
Primeira coluna:
( I ) Etapa de programação.
( II) Unidade de Controle.
( III) Parte Elétrica.
( IV) Parte Mecânica.
Segunda coluna:
(__) Que possui engrenagens e outros componentes mecânicos.
(__) Normalmente, realizada com um computador.
(__) Que exige um processador.
(__) Composta por motores e sensores.
Assinale a alternativa que apresenta a correta associação entre as colunas:
Primeira coluna:
( I ) Etapa de programação.
( II) Unidade de Controle.
( III) Parte Elétrica.
( IV) Parte Mecânica.
Segunda coluna:
(__) Que possui engrenagens e outros componentes mecânicos.
(__) Normalmente, realizada com um computador.
(__) Que exige um processador.
(__) Composta por motores e sensores.
Assinale a alternativa que apresenta a correta associação entre as colunas:
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081665
Engenharia Mecatrônica
Uma esteira transportadora deve ser acionada toda vez que um sensor de detecção de peças é ativado em sua
entrada. A esteira deve ser mantida acionada até que se passem 5 minutos da última vez que o sensor de peças
esteve ativo.
Tendo isso em mente, considere os 3 trechos de programas apresentados a seguir.
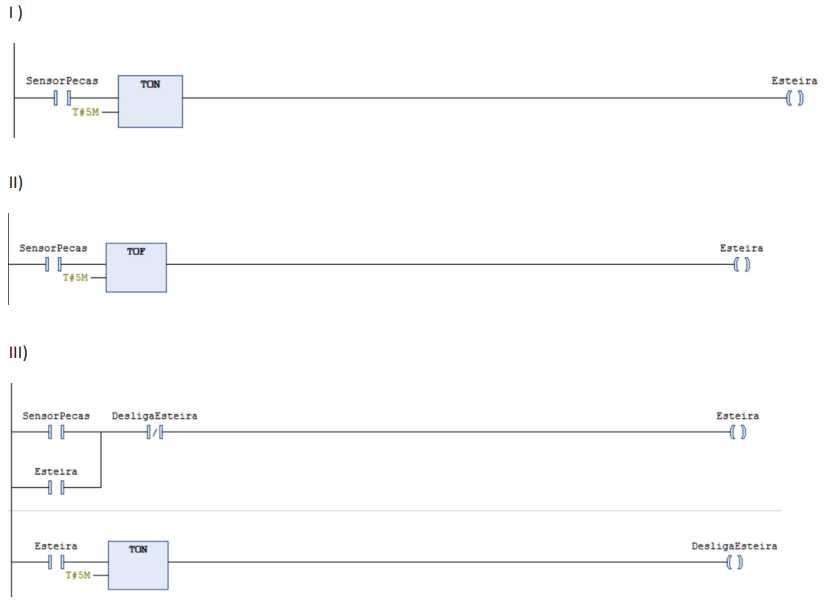
O comportamento desejado é apresentado apenas em
Tendo isso em mente, considere os 3 trechos de programas apresentados a seguir.
O comportamento desejado é apresentado apenas em
Q1393181
Engenharia Mecatrônica
Com a finalidade de aumentar a aplicação da rede de
Petri, é correto afirmar, sobre as redes de Petri coloridas,
que
Q1393180
Engenharia Mecatrônica
A rede de Petri é uma técnica de modelagem que permite
a representação de sistemas, utilizando como alicerce
uma forte base matemática. Sobre as classes das redes
de Petri, no que diz respeito à rede binária, assinale a
alternativa correta.
Q1393151
Engenharia Mecatrônica
Os algoritmos de busca e de ordenação compreendem um
conjunto de algoritmos de elevada importância para a
computação. Sobre o algoritmo de ordenação denominado
Inserção, assinale a alternativa correta.
Q1393150
Engenharia Mecatrônica
A análise de algoritmos é uma disciplina de engenharia,
pois procura prever o comportamento de um algoritmo
antes que ele seja efetivamente implementado e colocado
“em produção”. A corretude é um dos aspectos
importantes na análise de um algoritmo, sobre a qual é
correto afirmar que
Q134586
Engenharia Mecatrônica
Texto associado
Na implementação de um controlador para motor de corrente
contínua, pode-se utilizar abordagem digital microprocessada.
Um algoritmo de controle monitora variáveis do motor e gera
sinais de controle que, adequadamente condicionados, são
utilizados para a excitação do mesmo. Com relação ao controle
digital microprocessado ou microcontrolado, julgue os itens a
seguir.
contínua, pode-se utilizar abordagem digital microprocessada.
Um algoritmo de controle monitora variáveis do motor e gera
sinais de controle que, adequadamente condicionados, são
utilizados para a excitação do mesmo. Com relação ao controle
digital microprocessado ou microcontrolado, julgue os itens a
seguir.
Para monitoramento de posição e velocidade angulares, pode-se acoplar um encoder incremental no eixo do motor, já que os sinais de saída desse tipo de sensor têm natureza digital adequada a um circuito de controle digital.