Questões de Concurso Sobre engenharia eletrônica
Foram encontradas 4.396 questões
Considere o circuito da figura 5:
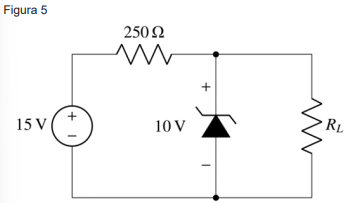
Para que o diodo Zener atue na região ruptura, RL deve ser, no mínimo:
Sobre o microcontrolador ATmega328 e suas funcionalidades de entrada e saída (I/Os), analise as seguintes alternativas e assinale a correta:
No microcontrolador ATmega328 o conversor analógico-digital (ADC) possui uma resolução de 10 bits, permitindo a leitura de valores analógicos entre 0 e 1023. Sabendo que o ADC opera com um clock máximo de 200 kHz e que o Arduino Uno utiliza um clock principal de 16 MHz, qual das seguintes afirmativas descreve corretamente uma característica crítica do processo de conversão analógico-digital nesse microcontrolador?
I. O ADC utiliza um referencial de tensão fixo de 5V, que não pode ser alterado, independentemente da tensão de alimentação do microcontrolador, resultando sempre em uma resolução de 4.88 mV por nível de quantização.
II. O ADC permite o uso de diferentes referências de tensão, como a tensão de alimentação (Vcc), uma referência interna de 1.1V, ou uma tensão externa aplicada ao pino AREF, resultando em diferentes resoluções de quantização.
III. O tempo de conversão de uma leitura analógica para digital é determinado pela frequência do clock do ADC, que pode ser configurada por meio de um prescaler. O tempo de conversão diminui quando o prescaler é configurado para diminuir a frequência do clock do ADC.
IV. O tempo total de conversão de uma leitura analógica para digital depende exclusivamente da frequência de clock do sistema, sendo que quanto maior esta frequência, maior será a taxa de amostragem.
O protocolo SPI (Serial Peripheral Interface) é utilizado em microcontroladores da família ATmega para realizar a comunicação síncrona entre o mestre e um ou mais dispositivos escravos. No contexto de seu funcionamento, qual das seguintes afirmativas descreve corretamente um comportamento desse protocolo?
I. O SPI no ATmega328 pode ser configurado através de registrador específico, sendo o sinal de clock (SCK) gerado pelo mestre, com possibilidade de modificar polaridade e fase (CPOL e CPHA), permitindo maior flexibilidade na comunicação com diferentes dispositivos.
II. O protocolo SPI é half-duplex, o que significa que ambos os dispositivos (mestre e escravo) podem enviar e receber simultaneamente dados, mas também pode ser configurado para funcionar como simplex, isto é, apenas um dispositivo transmite dados (normalmente o mestre).
III. No ATmega328, quando em modo mestre no SPI, o gerenciamento dos pinos SS (Slave Select) é feito de maneira automática, com terminais específicos para cada escravo.
IV. Em um barramento SPI, vários escravos podem compartilhar as mesmas linhas de dados (MOSI e MISO), mas o mestre deve selecionar individualmente cada escravo utilizando a linha SS (Slave Select). Se dois escravos forem ativados ao mesmo tempo, o barramento SPI entra em estado de conflito, o que interrompe automaticamente a comunicação.
O protocolo TWI (Two-Wire Interface), presente nos microcontroladores da família ATmega permite a comunicação entre dispositivos em um barramento compartilhado, como sensores e microcontroladores. Em relação à organização e controle da comunicação no barramento, qual das seguintes afirmativas é verdadeira?
I. No ATmega328 é possível gerar uma interrupção quando reconhecido o endereço configurado mesmo que ele esteja no modo sleep.
II. Durante uma transmissão no protocolo TWI, o dispositivo escravo pode iniciar uma comunicação enviando diretamente um sinal de start para o mestre, eliminando a necessidade de um sinal de start gerado pelo mestre.
III. No barramento, deve haver apenas um mestre, e ele é o único responsável por iniciar e controlar as transações de dados com múltiplos escravos, utilizando sinais de start, stop e ack.
IV. A velocidade de comunicação no barramento é fixada em 100 kHz para todos os dispositivos, independentemente das suas capacidades ou configurações de hardware.
Considere que um timer de 8 bits do microcontrolador ATmega328 com um prescaler configurado para 64. A frequência de clock do sistema é de 16 MHz. Qual será o tempo até o estouro (overflow) desse timer, assumindo que ele está operando no modo normal e inicia com valor zero?
Em Eletrônica de Potência 4 (quatro) são os conversores estáticos principais estudados, são eles, o retificador, o inversor, o cicloconversor e o chopper. O diagrama a seguir ilustras essas conversões.
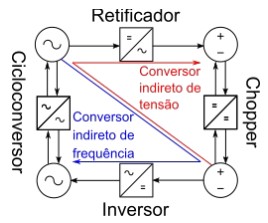
O chopper corresponde ao conversor c.c./c.c. de único estágio de conversão. Várias são as situações em que este conversor pode ser requirido, seja aumentando ou diminuindo o valor da tensão c.c., ou mesmo mantendo-o este valor variável em função de algum sinal de controle.
Em relação a esses conversores chaveados, é correto dizer:
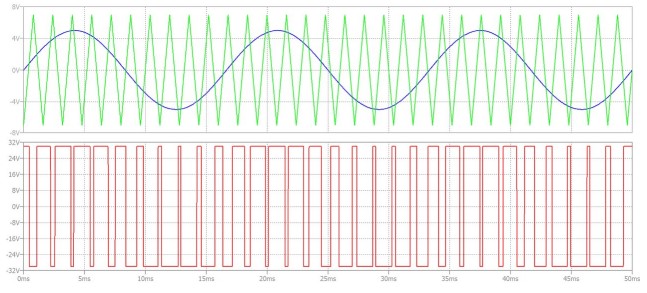
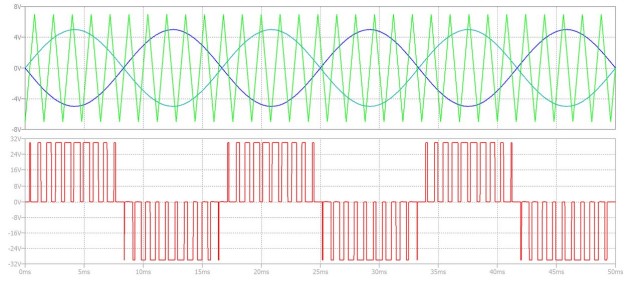
Uma das técnicas comumente utilizadas no controle do chaveamento em alguns conversores é a modulação por largura de pulso senoidal (SPWM). Alguns variantes são possíveis na implementação do PWM, além da senoidal, como, por exemplo, SVPWM ou a DPWM. Neste momento, o que interessa é identificar e estabelecer uma análise comparativa entre as duas técnicas implementadas e apresentadas nas figuras seguintes.
Técnica 1
Técnica 2
I. A técnica 1 é de mais simples implementação, embora requeira filtros maiores para atenuar ou eliminar componentes harmônicos.
II. Ambas as técnicas exigem que a amplitude da portadora seja maior que a amplitude do sinal de referência, o que estabelece que o índice de modulação seja maior do que 1.
III. Nas técnicas implementadas, um importante parâmetro é a razão de frequência, que deve ter o menor valor possível, sabendo que, quanto maior a frequência de chaveamento, maiores serão as perdas de comutação.
IV. A técnica 2 apresenta uma vantagem quando se analisa o conteúdo harmônico, pois o primeiro conteúdo harmônico de alta frequência aparece em torno do segundo harmônico da portadora.
V. Embora a técnica 2 apresente o sinal modulado em 3 níveis e a técnica 1 em 2 níveis, a excursão e os conceitos de índice de modulação e razão de frequência são os mesmos.
Pode-se dizer que são verdadeiras as seguintes afirmações:
A conversão de energia é uma das necessidades básicas da sociedade, podendo acontecer por dois métodos comumente: conversor dinâmico ou rotativo e o conversor estático. O conversor estático é o processo de conversão por dispositivo eletrônicos de estado sólido. A tecnológica empregada nos conversores estáticos pode ser do tipo linear ou chaveado. Uma boa maneira de comparar esses dois tipos de conversores estáticos e fazendo uma análise das principais características entre as fontes de alimentação chaveada e a linear. Considere as afirmações seguintes sobre esses conversores:
I. As fontes lineares são mais robustas e mais simples de projetar.
II. Se comparadas, para uma mesma potência de saída, as fontes lineares são menores.
III. As fontes chaveadas apresentam uma maior poluição harmônica.
IV. Para uma dada aplicação, as fontes chaveadas normalmente apresentam um valor de custo menor.
V. As fontes lineares são mais flexíveis, podendo gerar vários níveis de tensão.
Pode-se dizer que são verdadeiras as seguintes afirmações:
Os filtros ativos são circuitos eletrônicos capazes de atenuar ou eliminar, ou senão, selecionar ou rejeitar alguma faixa de frequência a partir de um sinal de entrada (Vi), promovendo também algum tipo de amplificação deste sinal que aparecerá na saída (Vo).
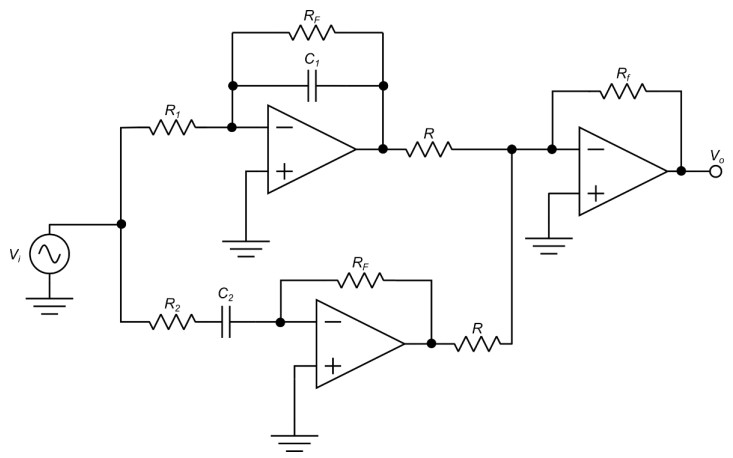
Considerando o circuito apresentado, as seguintes afirmações podem ser feitas:
Os circuitos amplificadores aumentam a força de um sinal de entrada, tornando-o adequado para acionar cargas maiores ou para processamento adicional em sistemas eletrônicos. Um amplificador em cascata de 3 estágios é composto pelos seguintes estágios e parâmetros:
Parâmetros:
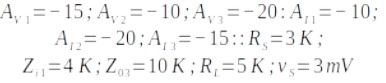
A tensão de saída no último estágio do amplificador é:
Um transformador abaixador dom derivação central e relação de espiras primário-secundário de 10:2 é usado para alimentar um retificador de onda completa com dois diodos, cada um com resistência direta de 30 Ω. A alimentação principal CA é de 220 Vrms, 50 Hz e a resistência de carga aplicada ao retificador é de 1 KΩ. Determine a eficiência do retificador de onda completa. Despreze a resistência da bobina secundária do transformador.
Determine a eficiência do retificador de onda completa. Despreze a resistência da bobina secundária do transformador.
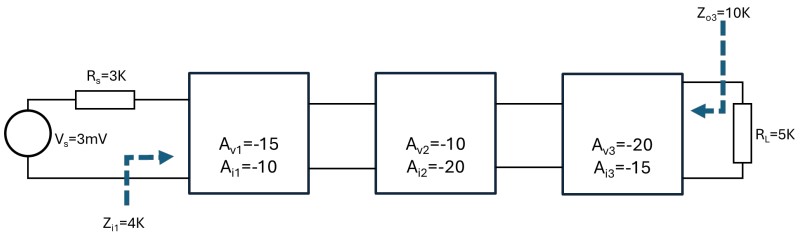
Os circuitos digitais nos carros gerenciam funções como controle do motor, sistemas de freios e infoentretenimento, processando dados de sensores e executando comandos eletronicamente. Quatro saídas digitais V, P, T e H monitoram a velocidade (v), pressão dos pneus (p), temperatura (t) e umidade relativa (h) do carro. Estas saídas passam de 0 a 1 quando os valores dos parâmetros ultrapassam 85 km/h, 2 bar, 40ºC e 50%, respectivamente. Um circuito lógico é usado para ligar uma lâmpada na saída E como mostrado na Figura 3:
Figura 3 - Circuito lógico
Qual das seguintes condições acenderá a lâmpada?
O diodo e o transistor da Figura 2 são ideais. X e Y são sinais digitais com 0 V como lógica 0 e +VCC como lógica 1. A expressão booleana para Z é dada por:
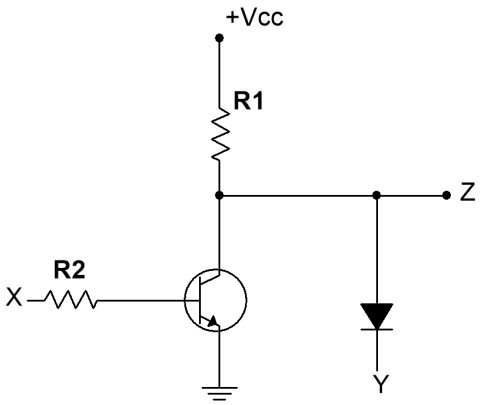
Figura 2 - Circuito com diodo e transistor
Contadores digitais são dispositivos eletrônicos usados para contar pulsos ou eventos, exibindo a contagem em formato binário ou decimal. O MSB de um contador MOD-16 produz uma onda quadrada de frequência de 1 kHz e o pulso de clock é uma onda quadrada simétrica. A frequência do clock é:
Assinale a alternativa que corretamente completa as lacunas no excerto: