Questões de Concurso Sobre engenharia eletrônica
Foram encontradas 4.396 questões
Cargas consumidoras de energia elétrica residenciais ou industriais podem consumir energia
reativa indutiva. Esses tipos de carga podem ser
motores, reatores de lâmpadas, transformadores,
etc. Sobre esse tipo de consumo e sua potência
medida, podemos afirmar:
Foi desenvolvido um equipamento de comunicação para funcionar como interfone, composto por
microfone, fone e microcontrolador. O microfone utilizado possui faixa de resposta de frequência entre
300 Hz e 15 kHz, conforme ilustrado abaixo, enquanto todo o circuito está cuidadosamente acomodado em
espaço sob medida, garantindo ajuste preciso dos componentes principais. Para garantir que apenas a voz
humana (geralmente na faixa de 300 Hz a 3,4 kHz) seja transmitida de forma eficiente e com qualidade,
é necessária uma filtragem adequada. Considerando o contexto do equipamento e suas características de
projeto, qual seria a solução mais estável e confiável para realizar essa filtragem?

Fonte: IFSP, 2024
Um forno industrial utilizado no processo de fundição é aquecido por uma resistência elétrica. O controle da energia fornecida à resistência é feito por meio de um TRIAC em um circuito de corrente alternada monofásica. O ajuste da potência média aplicada ao forno depende da variação no ângulo de disparo do TRIAC.
Qual das alternativas abaixo descreve corretamente o comportamento do TRIAC para garantir a quantidade adequada de energia fornecida ao forno?
Na indústria atual, um importante sistema
de controle é baseado nas técnicas proporcional,
integral e derivativa . Em alguns casos, esses métodos são utilizados isoladamente e, em algumas
aplicações, são utilizados conjuntamente. Sobre os
métodos de controle proporcional, integral e derivativo, podemos afirmar somente que:
O uso de microcontroladores na indústria
moderna é cada vez maior. A cada lançamento de um novo tipo de microcontrolador, novos patamares de capacidade de processamento desses componentes são alcançados. Além disso, a facilidade de
programação também é algo que tem aumentado a
cada lançamento. Exemplo disso são os microcontroladores Arduino. A linha de código a seguir ilustra um recorte de um código escrito para Arduino:
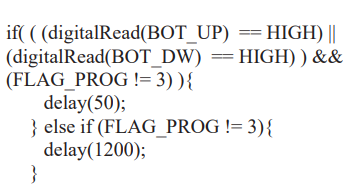
Com base nessas linhas de códigos podemos afirmar que:
Um carro de luxo foi desenvolvido com um
sistema que aquece o volante durante tempos de
frio, proporcionando maior conforto ao motorista.
O aquecimento é feito por uma resistência elétrica
que opera com tensão de 5 V. A bateria do veículo
fornece 12 V e, para garantir o aquecimento eficiente do volante, sem desperdício de energia, é
necessário escolher a solução mais adequada para
reduzir a tensão da bateria. Sabendo que a eficiência energética é uma prioridade em aplicações
automotivas, qual das opções abaixo é a correta
quanto ao procedimento mais indicado para alimentar o aquecedor do volante?
Analise os dois circuitos digitais a seguir:
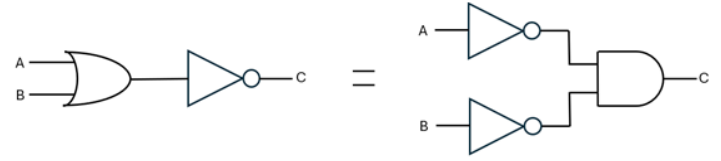
Fonte: IFSP, 2024.
Assinale a alternativa que contém o nome da teoria da eletrônica digital que valida a equivalência entre esses dois circuitos:
Em um sistema de navegação aérea, uma aeronave utiliza sinais de rádio frequência para determinar a sua posição em relação a várias estações terrestres. O sistema opera com modulação em amplitude (AM) para transmitir informações sobre a direção e a distância da aeronave até as estações. A frequência portadora utilizada é de 115 MHz, e a informação de direção é transmitida modulando a amplitude da portadora com um sinal de baixa frequência de 30 Hz.
No entanto, foi identificado que, em algumas situações, devido a interferências, a portadora da onda de rádio acaba sendo suprimida. Mesmo assim, o sistema é capaz de realizar a demodulação e de extrair a informação necessária para a navegação.
Qual tipo de demodulador seria ideal para este cenário?
Considere o seguinte esquema elétrico de
um CLP, elaborado para implementar uma lógica
de selo no seu contato de saída Q2 para ligar/desligar uma lâmpada L1 por meio do acionamento das
chaves S1 e S2:
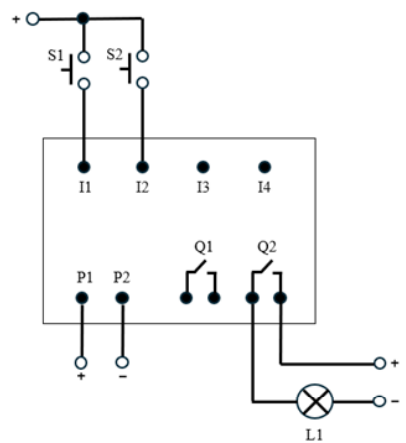
Fonte: IFSP, 2024
Qual alternativa a seguir ilustra um programa, em Linguagem de Programação Ladder, para implementar a lógica acima descrita?
Um determinado processo industrial pode
ser modelado através de um sistema linear em
diagrama em blocos representado na figura. Em
uma situação na qual o ganho do controlador seja
ajustado em K = 1, indique a alternativa que apresenta corretamente os polos de malha fechada e a
classificação do sistema quanto a sua estabilidade,
respectivamente.
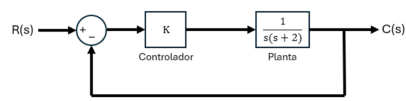
Fonte: IFSP, 2024.
Um dos critérios no estudo da qualidade de sistemas de controle em malha fechada é
o Erro de regime permanente, determinado por
Ereg = 
Deste modo, determine-o para o sistema de primeira ordem representado no diagrama de blocos a seguir considerando uma entrada de degrau unitário.
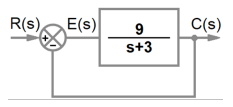
Fonte: IFSP, 2024
A modelagem matemática representa uma etapa importante em projetos de engenharia de controle
em que, após a aplicação das leis fundamentais, simplificações e aproximações, é possível determinar
uma equação matemática capaz de representar de
forma próxima o comportamento dinâmico de um
determinado sistema, seja ele térmico, mecânico,
elétrico ou hidráulico. Deste modo, dado o circuito
eletrônico a seguir, obtenha a função de transferência que represente seu comportamento dinâmico,
considerando o amplificador operacional ideal.
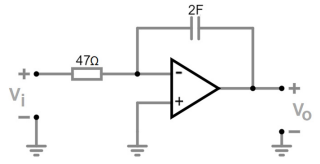
Fonte: IFSP, 2024
Um engenheiro de automação está programando um Controlador Lógico Programável
(CLP) para gerenciar o controle de um sistema de
esteiras em uma fábrica. O CLP é programado utilizando a linguagem Ladder para garantir que as
esteiras operem de maneira segura. A figura abaixo
mostra um diagrama Ladder utilizado para acionar
duas saídas, esteira 1 (Y1) e esteira 2 (Y2), com
base nas entradas X1, X2, X3 e X4.
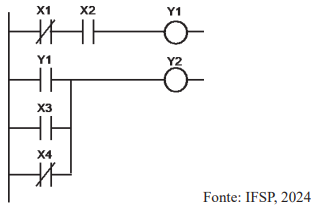
Com base no diagrama apresentado, analise as seguintes afirmativas:
I. Se a entrada X1 estiver desacionada, a esteira 1 será acionada, independentemente do estado de X2.
II. A esteira 2 será acionada se X3 e X4 forem acionadas.
III. Se todas as entradas estiverem desacionadas, a esteira 2 será acionada.
Quais afirmativas estão corretas?
O funcionamento de inversor de frequência consiste na variação da frequência que alimenta o motor
de indução trifásico, por meio de um circuito de controle e dispositivos de estado sólido, inicialmente tiristores e, nos dias atuais, IGBT’s. Porém, operar um motor com frequências abaixo ou acima da sua frequência nominal pode trazer dificuldades à operação. A figura a seguir mostra uma curva operacional típica que
os fabricantes divulgam para evitar danos ao motor, em que um fator é aplicado ao conjugado nominal para
determinar sua capacidade de trabalho.
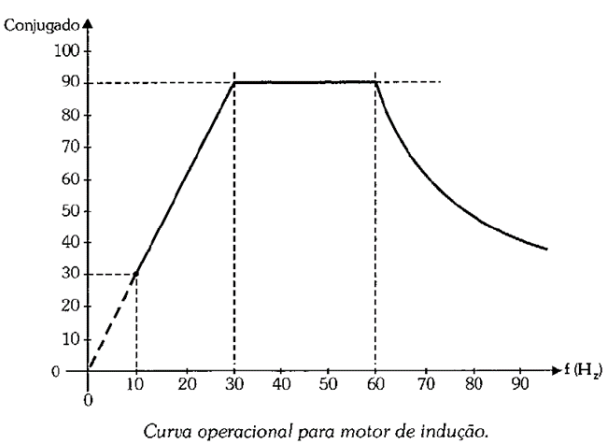
Fonte: FRANCHI, C. M. Acionamentos Elétricos.São Paulo: Érica, 4ª edição, 2014.
Assim, sobre operações com inversores de frequência, assinale a alternativa correta.
Em uma fábrica, um engenheiro precisa garantir que uma bomba de água seja ligada apenas
5 segundos após um sensor de nível detectar que
o tanque está vazio. Para isso, ele configurou um
temporizador de retardo na energização (TON)
com um tempo de 5 segundos no CLP. A bomba
deve permanecer ligada enquanto o sensor continuar indicando que o tanque está vazio. O que
acontecerá com a bomba se o sensor de nível detectar que o tanque está vazio por 3 segundos e, em
seguida, o nível voltar ao normal?
No estudo de sistemas de controle, nem sempre temos acesso fácil à função de transferência para
estudar a sua estabilidade. Uma técnica que pode ser utilizada neste caso é o levantamento experimental do
seu diagrama de bode.
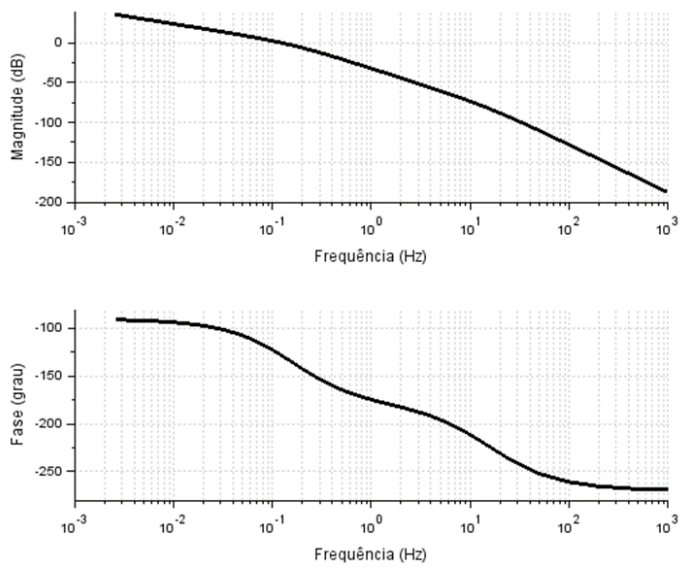
Fonte: IFSP, 2024
Considerando o diagrama de bode apresentado, determine a margem de ganho, margem de fase e a estabilidade deste sistema linear.

Julgue o próximo item, a respeito de teoria de controle.
Um sistema de controle de malha aberta normalmente
apresenta maior rejeição a distúrbios que um sistema de
malha fechada.
Julgue o próximo item, a respeito de teoria de controle.
Em comparação a um sistema de malha aberta, a
realimentação do sistema de malha fechada causa a redução
do ganho do sistema.
Julgue o próximo item, a respeito de teoria de controle.
Um sistema linear de malha fechada será estável se as raízes
da função 1 + G(s)H(s) = 0 estiverem no semiplano direito
do plano complexo s.