Questões de Concurso
Sobre inteligência artificial para engenharia de automação em engenharia de automação
Foram encontradas 7 questões
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081701
Engenharia de Automação
Sobre a aplicação do Filtro de Partículas (FP) no contexto da localização de robôs móveis, é correto afirmar que(,)
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081697
Engenharia de Automação
Um algoritmo de planejamento de movimentos baseado em amostragem é dito ser probabilisticamente
completo se(,)
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081681
Engenharia de Automação
Considere o robô mostrado na figura a seguir, tentando alcançar um alvo atrás do obstáculo. Ele foi programado com o comportamento descrito na sequência de 1 até 6. Sensores de contato indicam a colisão
com os obstáculos.
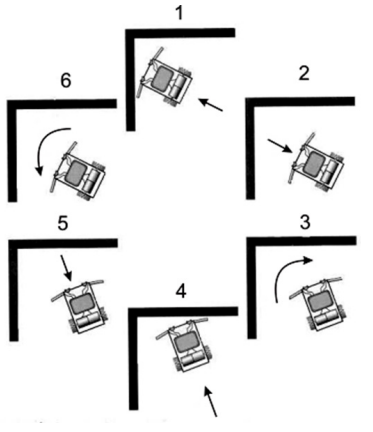
Para escapar dessa condição de mínimo local, basta mudar o comportamento de tal forma que o robô
Para escapar dessa condição de mínimo local, basta mudar o comportamento de tal forma que o robô
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081677
Engenharia de Automação
Informe se é verdadeiro (V) ou falso (F) o que se afirma sobre algoritmos de planejamento de caminho.
( ) Os algoritmos baseados em campos potenciais são suscetíveis a problemas de não convergência, devido a mínimos locais.
( ) O algoritmo Mapa de Rotas Probabilístico é considerado como capaz de resolver várias instâncias do problema de planejamento, em um mesmo ambiente.
( ) O método de planejamento baseado no Diagrama de Voronoi tem a propriedade de minimizar a distância do robô aos obstáculos.
( ) O método de planejamento baseado no Grafo de Visibilidade tem a propriedade de maximizar a distância do robô aos obstáculos.
A sequência correta é
( ) Os algoritmos baseados em campos potenciais são suscetíveis a problemas de não convergência, devido a mínimos locais.
( ) O algoritmo Mapa de Rotas Probabilístico é considerado como capaz de resolver várias instâncias do problema de planejamento, em um mesmo ambiente.
( ) O método de planejamento baseado no Diagrama de Voronoi tem a propriedade de minimizar a distância do robô aos obstáculos.
( ) O método de planejamento baseado no Grafo de Visibilidade tem a propriedade de maximizar a distância do robô aos obstáculos.
A sequência correta é
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081676
Engenharia de Automação
Analise as asserções a seguir e a relação proposta entre elas.
I - Na robótica móvel, em se tratando de algoritmos de planejamento de caminhos, são desejáveis como características: possibilidade de cálculo em tempo de execução; tratamento de obstáculos complexos; facilidade de implementação; lidar com incertezas
PORQUE
II - tais robôs podem ser usados em ambientes bem estruturados, esparsos, com iluminação uniforme e com poucas fontes de distúrbios.
A respeito das asserções, é correto afirmar que
I - Na robótica móvel, em se tratando de algoritmos de planejamento de caminhos, são desejáveis como características: possibilidade de cálculo em tempo de execução; tratamento de obstáculos complexos; facilidade de implementação; lidar com incertezas
PORQUE
II - tais robôs podem ser usados em ambientes bem estruturados, esparsos, com iluminação uniforme e com poucas fontes de distúrbios.
A respeito das asserções, é correto afirmar que
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541200
Engenharia de Automação
Texto associado
Abaixo são apresentadas três características de diferentes sistemas computadorizados de apoio à produção:
I. Uso abrangente dos sistemas computadorizados nas etapas de projeto do produto, planejamento da produção, controle das operações e execução de diferentes funções de processamento de informações presentes em uma empresa de produção.
II. Uso de sistemas computadorizados no apoio à função de projeto do produto.
III. Uso de sistemas computadorizados na execução de funções relacionadas à engenharia de manufatura.
As características acima se referem, respectivamente, a quais sistemas computadorizados, na ordem de cima para baixo?
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541193
Engenharia de Automação
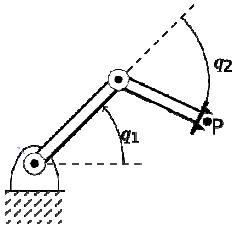
Seja o manipulador planar da figura abaixo, com duas juntas rotacionais, cujas posições são definidas pelas variáveis q1 e q2. O efetuador final está montado no elo 2, e sua posição é definida pelo ponto P. Em relação à cinemática desse manipulador, é INCORRETO afirmar: