Questões de Concurso
Sobre diagramas de bloco e de bode em engenharia de automação
Foram encontradas 15 questões
Ano: 2026
Banca:
INSTITUTO AOCP
Órgão:
IF-CE
Prova:
INSTITUTO AOCP - 2026 - IF-CE - Professor EBTT - Eletrônica Analógica, Digital, de Potência e Sistemas de Controle |
Q4090277
Engenharia de Automação
A margem de fase de um sistema em malha aberta
é definida como
Ano: 2026
Banca:
IDCAP
Órgão:
UEFS
Prova:
IDCAP - 2026 - UEFS - Analista Universitário - Engenharia de Controle e Automação |
Q4058719
Engenharia de Automação
O projeto de controladores digitais requer a discretização
de sistemas contínuos, levando em conta o tempo de
amostragem e a estabilidade no plano Z. Acerca do
assunto, registre V, para as afirmativas verdadeiras, e F,
para as falsas:
(__)Aumentar a ação derivativa de um controlador Proporcional Integral Derivativo tende a tornar a resposta do sistema mais lenta, porém reduz significativamente as oscilações em alta frequência.
(__)No diagrama de Bode, a margem de fase é definida como a defasagem adicional necessária para que o sistema atinja cento e oitenta graus na frequência em que o ganho é de zero decibéis.
(__)No espaço de estados, um sistema é considerado completamente controlável se for possível transferir qualquer estado inicial para qualquer outro estado final em um intervalo de tempo finito.
(__)A estabilidade de um sistema discreto no plano Z é garantida se todos os polos da função de transferência estiverem localizados fora do círculo unitário centrado na origem.
Após análise, assinale a alternativa que apresenta a sequência correta dos itens acima, de cima para baixo:
(__)Aumentar a ação derivativa de um controlador Proporcional Integral Derivativo tende a tornar a resposta do sistema mais lenta, porém reduz significativamente as oscilações em alta frequência.
(__)No diagrama de Bode, a margem de fase é definida como a defasagem adicional necessária para que o sistema atinja cento e oitenta graus na frequência em que o ganho é de zero decibéis.
(__)No espaço de estados, um sistema é considerado completamente controlável se for possível transferir qualquer estado inicial para qualquer outro estado final em um intervalo de tempo finito.
(__)A estabilidade de um sistema discreto no plano Z é garantida se todos os polos da função de transferência estiverem localizados fora do círculo unitário centrado na origem.
Após análise, assinale a alternativa que apresenta a sequência correta dos itens acima, de cima para baixo:
Ano: 2026
Banca:
IDCAP
Órgão:
UEFS
Prova:
IDCAP - 2026 - UEFS - Analista Universitário - Engenharia de Controle e Automação |
Q4058718
Engenharia de Automação
A análise de sistemas dinâmicos permite prever o
comportamento de processos físicos, sendo a
linearização uma técnica comum para tratar sistemas
não lineares em torno de um ponto de operação. No
estudo da estabilidade absoluta, um critério específico é
utilizado para determinar se um sistema de malha
fechada apresenta oscilações sustentadas ou
instabilidade com base em sua resposta em malha
aberta, considerando o plano complexo. Acerca desse
contexto, assinale a alternativa correta.
Q3852260
Engenharia de Automação
Seja um compensador de avanço de fase com função de
transferência D(s) = (s + z)/(s + p), em que z e p são reais positivos
e, correspondem, respectivamente, às frequências de quebra do
zero e do polo do compensador na sua resposta em frequência,
avaliada em radianos por segundo.
O valor máximo da fase da resposta em frequência deste compensador encontra-se na frequência correspondente ao(à)
O valor máximo da fase da resposta em frequência deste compensador encontra-se na frequência correspondente ao(à)
Ano: 2025
Banca:
CEPS-UFPA
Órgão:
UFOPA
Prova:
CEPS-UFPA - 2025 - UFOPA - Engenheiro/Área: Automação |
Q3270286
Engenharia de Automação
Com base no diagrama de blocos mostrado na figura a seguir, identifique a função de transferência da
entrada de referência r (k) e de perturbação v (k) para a saída y (k) .

A função de transferência correta é
A função de transferência correta é
Ano: 2025
Banca:
CEPS-UFPA
Órgão:
UFOPA
Prova:
CEPS-UFPA - 2025 - UFOPA - Engenheiro/Área: Automação |
Q3270282
Engenharia de Automação
O diagrama de resposta em frequência contendo as curvas de magnitude e fase do sistema de malha
direta, C(z) G(z) , é mostrado na figura a seguir. C(z) é um controlador Proporcional-Integral discreto e G(z) é o modelo discreto da planta, sendo esta do tipo-0 e subamortecida.

Com base no diagrama da figura, a margem de ganho e a margem de fase são, respectivamente:
Com base no diagrama da figura, a margem de ganho e a margem de fase são, respectivamente:
Ano: 2024
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2024 - IF-MG - PROFESSOR EBTT – Engenharia de Controle e Automação - Sabará |
Q3329536
Engenharia de Automação
A resposta em frequência de um sistema de fase nula H (jω) é representada abaixo.
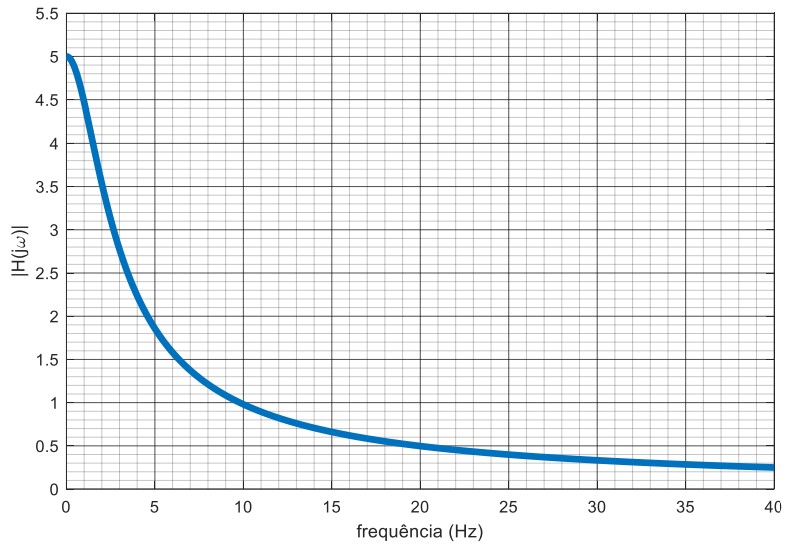
Um sinal x (t), dado por:

é aplicado na entrada do sistema, gerando o sinal de saída y(t).
Selecione a alternativa que especifica corretamente o sinal y(t).
Ano: 2024
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2024 - IF-MG - PROFESSOR EBTT – Engenharia de Controle e Automação - Sabará |
Q3329535
Engenharia de Automação
O diagrama de Bode de um sistema G(s) é apresentado a seguir.
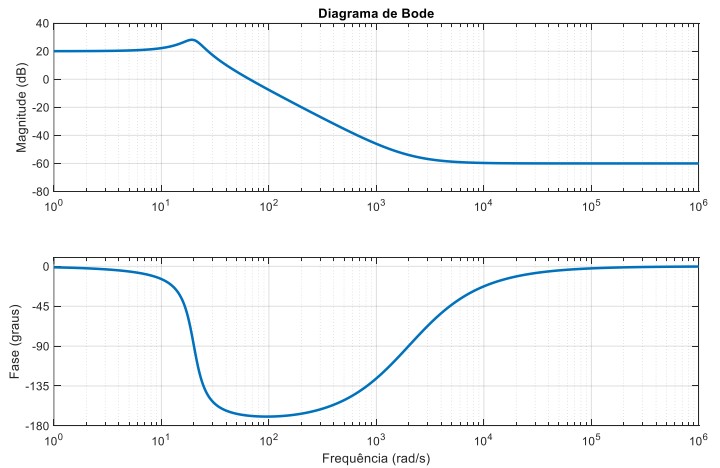
Com base no diagrama de Bode apresentado, a função de transferência ????(????) é dada por:
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328613
Engenharia de Automação
Considere o Lugar Geométrico das Raizes (LGR) da Figura abaixo.

Considerando-se as informações acima, verifica-se que
K = 3 é o ganho
Ano: 2022
Banca:
FEPESE
Órgão:
CASAN-SC
Prova:
FEPESE - 2022 - CASAN-SC - Engenheiro - Engenharia de Controle e Automação Industrial |
Q4149202
Engenharia de Automação
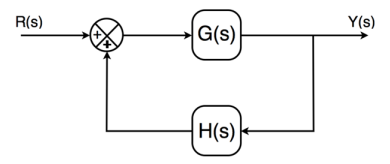
Um sistema em uma estação de tratamento de
água foi modelado pelo diagrama de blocos a seguir,
onde U(s) e Y(s) são sinais de entrada e de saída,
respectivamente.

Assinale a alternativa correta sobre a resposta do sistema em malha fechada com o ganho constante Kp = 4 e um sinal do tipo degrau unitário aplicado na entrada U(s).
Assinale a alternativa correta sobre a resposta do sistema em malha fechada com o ganho constante Kp = 4 e um sinal do tipo degrau unitário aplicado na entrada U(s).
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081659
Engenharia de Automação
Assinale a alternativa que apresenta os valores da
margem de ganho (MG) e da margem de fase (MF)
que são obtidos pelo diagrama de Bode apresentado
na figura a seguir.
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081658
Engenharia de Automação
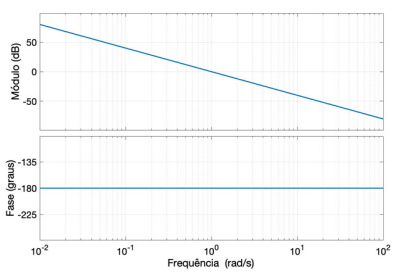
Considere o diagrama de Bode apresentado na figura
a seguir.
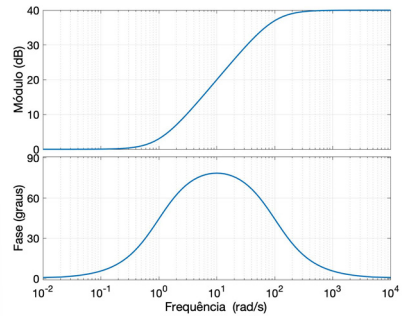
Esse diagrama de Bode apresenta a resposta em frequência de qual tipo de controlador?
Esse diagrama de Bode apresenta a resposta em frequência de qual tipo de controlador?
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081656
Engenharia de Automação
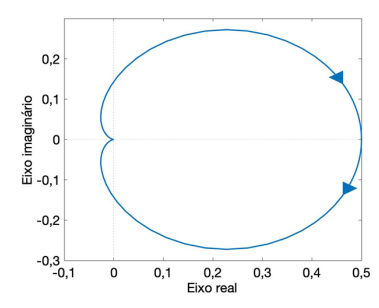
Assinale a alternativa que apresenta os valores da
margem de ganho (MG) e da margem de fase(MF)
que são obtidos pelo diagrama de Nyquist apresentado na figura a seguir
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081646
Engenharia de Automação
Considere o diagrama de controle na figura a seguir.
A equação que representa corretamente a relação entre a entrada e a saída deste sistema é
A equação que representa corretamente a relação entre a entrada e a saída deste sistema é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Engenheiro de Equipamento Júnior - Mecânica - Biocombustível |
Q187542
Engenharia de Automação
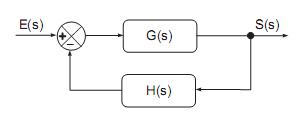
O controle de um processo é representado pelo diagrama de blocos acima, onde E(s) é a entrada, S(s) é a saída, G(s) é a função de transferência do processo a ser controlado e H(s) é a função de transferência do controlador. Considerando-se uma realimentação unitária, a função de transferência do sistema com o controlador, FT = S(s)/E(s), é expressa por