As diversas posições da extremidade de um braço robót...
Próximas questões
Com base no mesmo assunto
Q466927
Matemática
As diversas posições da extremidade de um braço robótico podem ser identificadas por ternas (x, y, z) em um sistema cartesiano ortogonal de três eixos, XYZ.
Na figura a seguir, o sistema XYZ tem centro C = (0, 0, 0), e P representa um ponto de coordenadas , que corresponde a certa posição da extremidade do braço robótico.
, que corresponde a certa posição da extremidade do braço robótico.
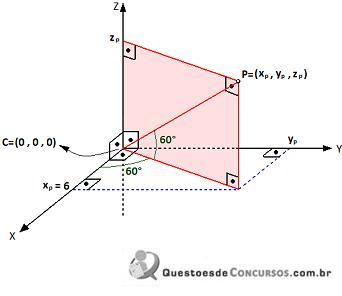
De acordo com os dados disponíveis na figura, P tem coordenadas
Na figura a seguir, o sistema XYZ tem centro C = (0, 0, 0), e P representa um ponto de coordenadas
, que corresponde a certa posição da extremidade do braço robótico. De acordo com os dados disponíveis na figura, P tem coordenadas