Questões da Prova Instituto Acesso - 2015 - Colégio Pedro II - Engenheiro Área (Eletricista)
Foram encontradas 69 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2015
Banca:
Instituto Acesso
Órgão:
Colégio Pedro II
Prova:
Instituto Acesso - 2015 - Colégio Pedro II - Engenheiro Área (Eletricista) |
Q570069
Engenharia Elétrica
Um motor universal possui seus terminais de bobina de campo e de induzido acessíveis, conforme apresentado
na figura.
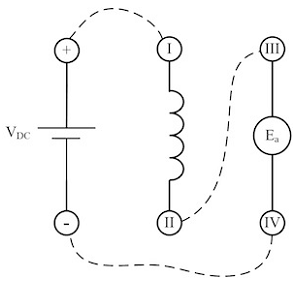
De modo a inverter o sentido de rotação do motor em relação ao sentido de rotação da figura, o motor deverá ter seus terminais ligados da forma como apresentado na opção:
De modo a inverter o sentido de rotação do motor em relação ao sentido de rotação da figura, o motor deverá ter seus terminais ligados da forma como apresentado na opção:
Ano: 2015
Banca:
Instituto Acesso
Órgão:
Colégio Pedro II
Prova:
Instituto Acesso - 2015 - Colégio Pedro II - Engenheiro Área (Eletricista) |
Q570068
Engenharia Elétrica
O gerador de corrente contínua com enrolamento compensador apresentado na figura tem em seus terminais uma carga de 1 Ω.
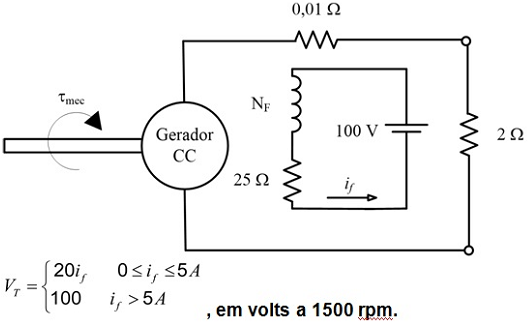
A curva de magnetização desse gerador, para uma determinada faixa de operação, pode ser aproximada pela seguinte expressão Vt. As perdas rotacionais, a ventilação, as perdas do núcleo e as perdas diversas do gerador totalizam 500 W. Sabendo-se que o gerador é acionado a uma velocidade de 1400 rpm, o torque mecânico fornecido ao gerador pela força motriz, em N.m, é:
A curva de magnetização desse gerador, para uma determinada faixa de operação, pode ser aproximada pela seguinte expressão Vt. As perdas rotacionais, a ventilação, as perdas do núcleo e as perdas diversas do gerador totalizam 500 W. Sabendo-se que o gerador é acionado a uma velocidade de 1400 rpm, o torque mecânico fornecido ao gerador pela força motriz, em N.m, é:
Ano: 2015
Banca:
Instituto Acesso
Órgão:
Colégio Pedro II
Prova:
Instituto Acesso - 2015 - Colégio Pedro II - Engenheiro Área (Eletricista) |
Q570067
Engenharia Elétrica
A figura apresenta a vista superior de um sistema de tração hipotético, composto por trilhos condutores espaçados de 1 m, alimentados por uma fonte de tensão contínua de 100 V.
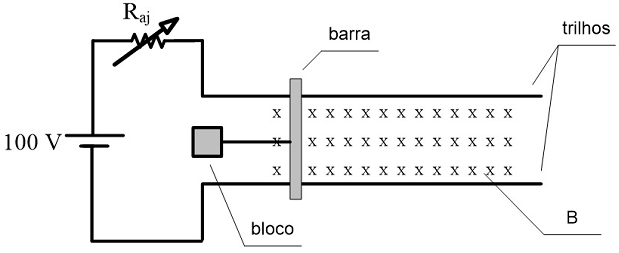
Os trilhos estão imersos em uma região do espaço sujeita a uma densidade de campo B = 10 Wb/m2 e neles repousa uma barra condutora ideal, de massa desprezível e de comprimento igual a 1,2 m. Um bloco de massa igual a 2 kg é conectadoà barra por meio de um fio ideal. A massa da barra é desprezível quando comparada à massa do bloco.
Os coeficientes de atrito estático e dinâmico entre o bloco e a superfície são, respectivamente, 0,4 e 0,3. Sabendo-se que a aceleração da gravidade é 10 m/s2, para que a velocidade em regime permanente do conjunto seja 5 m/s, o valor da resistência Raj, em Ω, é aproximadamente:
Os trilhos estão imersos em uma região do espaço sujeita a uma densidade de campo B = 10 Wb/m2 e neles repousa uma barra condutora ideal, de massa desprezível e de comprimento igual a 1,2 m. Um bloco de massa igual a 2 kg é conectadoà barra por meio de um fio ideal. A massa da barra é desprezível quando comparada à massa do bloco.
Os coeficientes de atrito estático e dinâmico entre o bloco e a superfície são, respectivamente, 0,4 e 0,3. Sabendo-se que a aceleração da gravidade é 10 m/s2, para que a velocidade em regime permanente do conjunto seja 5 m/s, o valor da resistência Raj, em Ω, é aproximadamente:
Ano: 2015
Banca:
Instituto Acesso
Órgão:
Colégio Pedro II
Prova:
Instituto Acesso - 2015 - Colégio Pedro II - Engenheiro Área (Eletricista) |
Q570066
Engenharia Elétrica
O controle de velocidade de um motor 3Φ de indução pode ser realizado mediante a variação da sua frequência. Aplicando-se este tipo de controle, o motor pode operar tanto com velocidade acima ou abaixo de sua velocidade nominal. Analisando este tipo de controle, pode-se afirmar que:
Ano: 2015
Banca:
Instituto Acesso
Órgão:
Colégio Pedro II
Prova:
Instituto Acesso - 2015 - Colégio Pedro II - Engenheiro Área (Eletricista) |
Q570065
Engenharia Elétrica
Com relação às características de torque, velocidade e escorregamento de um motor de indução, pode-se
afirmar que: