Questões de Concurso
Para engenharia
Foram encontradas 19.903 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Q3975285
Engenharia Naval
Considere a situação em que uma embarcação “A” avista
uma embarcação “B” por sua proa ou quase por sua proa, de
forma que, à noite, veja a luz dos mastros da embarcação “B”
enfiada ou quase enfiada. Em termos de manobras, pode-se dizer
que a embarcação:
Ano: 2026
Banca:
CESPE / CEBRASPE
Órgão:
IPAAM
Prova:
CESPE / CEBRASPE - 2026 - IPAAM - Analista Ambiental – Especialidade: Engenharia Agronômica |
Q3975225
Engenharia de Agrimensura
A figura a seguir ilustra a distribuição espacial de três
polígonos A, B e C em um terreno hipotético.
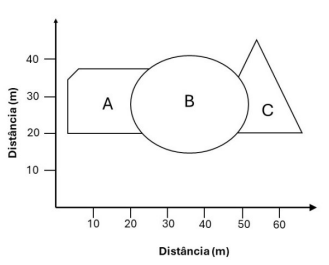
O número de linhas e nós presentes na figura precedente é, respectivamente, igual a
O número de linhas e nós presentes na figura precedente é, respectivamente, igual a
Ano: 2026
Banca:
CESPE / CEBRASPE
Órgão:
IPAAM
Prova:
CESPE / CEBRASPE - 2026 - IPAAM - Analista Ambiental – Especialidade: Engenharia Agronômica |
Q3975206
Engenharia de Agrimensura
No que se refere aos fundamentos do georreferenciamento,
assinale a opção correta.
Ano: 2026
Banca:
CESPE / CEBRASPE
Órgão:
IPAAM
Prova:
CESPE / CEBRASPE - 2026 - IPAAM - Analista Ambiental – Especialidade: Engenharia Agronômica |
Q3975205
Engenharia de Agrimensura
Considerando os princípios do geoprocessamento e dos sistemas
de informação geográfica (SIG), assinale a opção correta.
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Eletricista |
Q3975183
Engenharia Naval
Em um desenho técnico de um painel elétrico naval, uma
linha contínua e estreita, traçada à mão livre ou em zigue-zague,
é utilizada para indicar uma:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Eletricista |
Q3975182
Engenharia Naval
Um navio de deslocamento constante navega inicialmente
em água salgada padrão, com massa específica de 1.025 kg/m³.
Ao adentrar um rio, passa a flutuar em água doce, com massa
específica de 1.000 kg/m³. Sabe-se que o navio não realiza
operações de carga ou descarga durante essa transição e que
sua área do plano de flutuação (A_wp) pode ser considerada
constante para pequenas variações de calado. Considerando os
princípios hidrostáticos aplicáveis e os efeitos diretos da mudança
de densidade do fluido, a consequência física dessa transição
sobre a condição de flutuação do navio diz respeito ao fato de que
o:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Eletricista |
Q3975181
Engenharia Naval
Um navio apresenta deslocamento constante e navega
em condição de pequenas inclinações. Após uma modifi cação
estrutural, ocorre a elevação do centro de gravidade vertical (KG),
sem alteração do formato do casco nem da linha d’água. Sabe-se
que o raio metacêntrico transversal (BM) permanece inalterado, e
que a estabilidade transversal inicial pode ser avaliada por meio
de aproximações válidas para pequenos ângulos de inclinação.
Considerando exclusivamente os efeitos dessa modificação estrutural, a consequência direta sobre a estabilidade transversal inicial do navio pode ser constatada pelo fato de que o(a):
Considerando exclusivamente os efeitos dessa modificação estrutural, a consequência direta sobre a estabilidade transversal inicial do navio pode ser constatada pelo fato de que o(a):
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975132
Engenharia Mecatrônica
Deseja-se implementar um contador síncrono de 2 bits, com
saída  , que percorra a sequência de estados 00 → 01 →
10 → 11 → 00 a cada borda de subida do clock. Considere que os
dois flip-flops são do tipo D e que não há sinal de reset externo.
A lógica mínima para as entradas
, que percorra a sequência de estados 00 → 01 →
10 → 11 → 00 a cada borda de subida do clock. Considere que os
dois flip-flops são do tipo D e que não há sinal de reset externo.
A lógica mínima para as entradas  , em função de
, em função de  ,
que implementa essa sequência é:
,
que implementa essa sequência é:
, que percorra a sequência de estados 00 → 01 →
10 → 11 → 00 a cada borda de subida do clock. Considere que os
dois flip-flops são do tipo D e que não há sinal de reset externo.
A lógica mínima para as entradas , em função de ,
que implementa essa sequência é:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975131
Engenharia Mecatrônica
Em uma transmissão hidrostática (bomba hidráulica
acoplada a motor hidráulico) usada para acionar uma carga,
emprega-se uma bomba de deslocamento volumétrico variável
e um motor de deslocamento fixo. Além disso, a rotação do
acionador primário da bomba é mantida constante. Ao aumentar
o deslocamento volumétrico da bomba, o efeito principal sobre a
velocidade do motor hidráulico e sobre o torque no eixo da carga
é:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975130
Engenharia Mecatrônica
Considere a rede de Petri descrita a seguir, com lugares P0
(Processo 1 ocioso), P1
(Processo 2 ocioso), R1
(Recurso 1 livre),
R2
(Recurso 2 livre), P2
(Processo 1 segurando R1
e aguardando
R2
), P3
(Processo 2 segurando R2
e aguardando R1
), C1
e C2
(seções críticas). As transições (disparos) são:
t 1 : P0 + R1 → P2
t 2 : P2 + R2 → C1
t 3 : C1 → P0 + R1 + R2
t 4 : P1 + R2 → P3
t 5 : P3 + R1 → C2
t 6 : C2 → P1 + R1 + R2
A marcação inicial é M0 : 1 ficha em P0 , 1 ficha em P1 , 1 ficha em R1 e 1 ficha em R2 (demais lugares vazios), isto é, M0 = (P0=1, P1=1, R1=1, R2=1; demais=0). Em relação à alcançabilidade e deadlock (impasse) dessa rede, pode-se afirmar que:
t 1 : P0 + R1 → P2
t 2 : P2 + R2 → C1
t 3 : C1 → P0 + R1 + R2
t 4 : P1 + R2 → P3
t 5 : P3 + R1 → C2
t 6 : C2 → P1 + R1 + R2
A marcação inicial é M0 : 1 ficha em P0 , 1 ficha em P1 , 1 ficha em R1 e 1 ficha em R2 (demais lugares vazios), isto é, M0 = (P0=1, P1=1, R1=1, R2=1; demais=0). Em relação à alcançabilidade e deadlock (impasse) dessa rede, pode-se afirmar que:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975129
Engenharia Mecatrônica
Em um software de automação, o módulo de sensores foi
implementado de forma que várias partes do sistema acessam
e alteram diretamente os dados de um sensor, por exemplo, o
"off set" de calibração. Após manutenções, surgiram efeitos
colaterais, pois mudanças internas exigem correções em muitos
pontos do código. Para melhorar a modularidade e a manutenção,
decidiu-se aplicar conceitos de programação orientada a objetos,
pois o(a):
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975128
Engenharia Mecatrônica
Uma coluna esbelta (barra) de aço, biarticulada (pino–pino),
tem comprimento L = 1,5 m e momento de inércia da seção I =
150000 mm⁴. Considere E = 200 GPa, K = 1 e π = 3. Considerando
o critério de Euler, e adotando fator de segurança n = 2, a carga
axial máxima Pmax
recomendada para evitar flambagem é:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975127
Engenharia Mecatrônica
Um cilindro hidráulico deve fornecer força de avanço F = 15
kN em regime quase-estático. A pressão disponível na linha é p =
8 MPa. Considere π = 3, despreze perdas e considere apenas a
área efetiva do pistão no avanço. O diâmetro interno mínimo do
cilindro é:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975126
Engenharia Mecatrônica
Uma parede plana de espessura L = 0,10 m e condutividade
térmica k = 1,0 W/(m·K) opera em regime permanente com
condução unidimensional. As temperaturas das superfícies são
mantidas em T1
= 80 °C (face quente) e T2
= 20 °C (face fria).
Despreze resistências de contato e efeitos de convecção. O fluxo
de calor por unidade de área (módulo) através da parede é:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975125
Engenharia Mecatrônica
Considere um manipulador planar 2R (dois elos) com
comprimentos L1
= 1 m e L2
= 1 m. O ponto desejado do efetuador
final no referencial da base é P = (x, y) = (1 m, 1 m). As juntas
são rotativas, com ângulos q1
(ombro) e q2
(cotovelo), medidos no
sentido anti-horário. Para esse manipulador, a cinemática inversa
pode ter duas soluções (cotovelo “para cima” e “para baixo”) e
há singularidade quando os elos fi cam colineares (q2
= 0o
ou q2
= 180o). Nessa situação, as duas soluções de cinemática inversa
(q1
, q2
) e a condição de singularidade na posição P são:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975124
Engenharia Mecatrônica
Considere o procedimento recursivo abaixo, chamado com
n ≥ 0:
função F(n): se n = 0, retorna 1 senão retorna F(n − 1) + 1
Para esse procedimento, o número de chamadas recursivas, incluindo a chamada inicial, e a profundidade máxima da pilha, em função de n, são, respectivamente:
função F(n): se n = 0, retorna 1 senão retorna F(n − 1) + 1
Para esse procedimento, o número de chamadas recursivas, incluindo a chamada inicial, e a profundidade máxima da pilha, em função de n, são, respectivamente:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975123
Engenharia Mecatrônica
No ciclo Otto ideal (ciclo padrão do ar), a eficiência térmica
pode ser estimada por: η = 1 − 1/(r(k−1)), onde r é a taxa de
compressão e k é a razão de calores específicos. Considere um
motor operando em ciclo Otto ideal com taxa de compressão r =
16 e k = 1,5. A eficiência térmica η é:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975122
Engenharia Mecatrônica
Um sistema massa–mola de 1 grau de liberdade (sem
amortecimento) possui massa m = 1 kg e constante de mola k
= 100 N/m. Considere pequenas oscilações e considere π = 3.
A frequência natural angular ωn
e a frequência natural fn
são,
aproximadamente:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975121
Engenharia Mecatrônica
Uma viga simplesmente apoiada tem vão total de 5 m. Atua
uma carga concentrada P = 10 kN em um ponto do vão. O apoio
A está à esquerda e o apoio B está à direita. A carga está aplicada
em um ponto que fi ca a 2 m do apoio A, isto é, o apoio A está 2 m
à esquerda do ponto de aplicação, e a 3 m do apoio B, ou seja, o
apoio B está 3 m à direita do ponto de aplicação. Considerando
equilíbrio estático em 2D, as reações verticais nos apoios A e B,
respectivamente, são:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro Mecatrônico |
Q3975120
Engenharia Mecatrônica
Um sistema amostrado (controle digital) em malha fechada
com realimentação unitária possui planta discreta G(z) = 0,4/(z −
0,6) e compensador digital do tipo PI (Proporcional–Integral) na
forma C(z) = K·(z − 0,2)/(z − 1), obtido por aproximação Z/S. Para
K real, a equação característica do sistema em malha fechada é:
z² + (−1,6 + 0,4K)·z + (0,6 − 0,08K) = 0
Para um polinômio de 2ª ordem z² + a1 ·z + a0 , a estabilidade no domínio Z (polos dentro do círculo unitário) pode ser verificada pelo critério de Jury: |a0 | < 1, 1 + a1 + a0 > 0 e 1 − a1 + a0 > 0. O intervalo de K que garante estabilidade é:
z² + (−1,6 + 0,4K)·z + (0,6 − 0,08K) = 0
Para um polinômio de 2ª ordem z² + a1 ·z + a0 , a estabilidade no domínio Z (polos dentro do círculo unitário) pode ser verificada pelo critério de Jury: |a0 | < 1, 1 + a1 + a0 > 0 e 1 − a1 + a0 > 0. O intervalo de K que garante estabilidade é: