Selecionar segmento
Estude com questões de diferentes segmentos
Atenção: Isso limpará todos os campos já preenchidos no filtro!
Foram encontradas 4.410 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento de Sistemas de Suprimento de Energia para Satélites |
Q2523585
Engenharia Eletrônica
Ao projetar um circuito utilizando um amplificador operacional, o engenheiro responsável utilizou um potenciômetro para compensar o efeito da tensão de offset (desequilíbrio) da entrada do amplificador operacional.
Esse ajuste tem por finalidade
Esse ajuste tem por finalidade
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento de Sistemas de Suprimento de Energia para Satélites |
Q2523584
Engenharia Eletrônica
Diodos são importantes componentes eletrônicos amplamente utilizados em diversos tipos de circuitos.
Sobre os diodos, assinale a afirmativa correta.
Sobre os diodos, assinale a afirmativa correta.
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento de Sistemas de Suprimento de Energia para Satélites |
Q2523583
Engenharia Eletrônica
Os semicondutores são a matéria prima dos dispositivos eletrônicos, como diodos, TBJ, MOSFET, entre outros.
Com relação aos materiais semicondutores, assinale a afirmativa correta.
Com relação aos materiais semicondutores, assinale a afirmativa correta.
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento de Instrumentação Científica para Projetos Espaciais |
Q2523569
Engenharia Eletrônica
Um software de desenvolvimento para a configuração de um FPGA requer um arquivo de restrições. Uma das principais funções desse arquivo, necessária para compatibilizar a configuração ao projeto do layout da placa de circuito, é
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento de Instrumentação Científica para Projetos Espaciais |
Q2523562
Engenharia Eletrônica
Como requisito de um projeto com um microcontrolador alimentado com 5V, deve ser utilizada uma única porta de 8 bits para ler uma matriz de 8 teclas e acionar uma matriz com 8 LEDs, de forma que cada vez que uma tecla for acionada o respectivo LED deve mudar de estado (ON/OFF).
Com relação a esse requisito, supondo que as portas suportem a corrente dos LEDs e subentendendo a utilização de resistores, caso necessário, analise as afirmativas a seguir.
I. Não é possível, pois o acionamento das teclas vai interferir com os LEDs.
II. As portas devem atuar como saída para acionar os LEDs e como entrada para ler o estado das chaves.
III. Não é possível utilizar uma única porta como entrada e saída na mesma aplicação.
Está correto o que se afirma em
Com relação a esse requisito, supondo que as portas suportem a corrente dos LEDs e subentendendo a utilização de resistores, caso necessário, analise as afirmativas a seguir.
I. Não é possível, pois o acionamento das teclas vai interferir com os LEDs.
II. As portas devem atuar como saída para acionar os LEDs e como entrada para ler o estado das chaves.
III. Não é possível utilizar uma única porta como entrada e saída na mesma aplicação.
Está correto o que se afirma em
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento de Instrumentação Científica para Projetos Espaciais |
Q2523554
Engenharia Eletrônica
Com o auxílio de conversores A/D e D/A, um filtro digital é programado com o auxílio da sub-rotina de interrupção a seguir, que é invocada após cada aquisição de dado analógico.
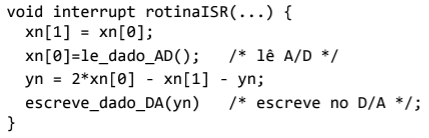
Assinale a opção que apresenta a equação implementada pelo filtro digital.
Assinale a opção que apresenta a equação implementada pelo filtro digital.
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento de Instrumentação Científica para Projetos Espaciais |
Q2523553
Engenharia Eletrônica
Em um sistema de controle, é importante saber a faixa possível de valores de uma variável para evitar-se o indesejado overflow no armazenamento do resultado final de uma operação. Seja o código C de um compilador que trabalha com inteiros de 16 bits.
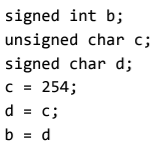
Após a execução desse trecho de código, o valor de b é
Após a execução desse trecho de código, o valor de b é
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento de Instrumentação Científica para Projetos Espaciais |
Q2523548
Engenharia Eletrônica
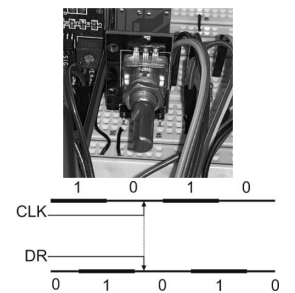
Fonte: “Módulos e Sensores: Guia de Interface com o Arduino.” Editora Interciência.
O módulo codificador de rotação da figura de cima possui dois sinais de interface (CLK e DR). O princípio de funcionamento segue a ideia da figura de baixo, onde dois cursores se movem solidários por trilhos alimentados com trechos em 0 e trechos em 1. A variável CONT vale 54 em determinado instante. Se DR = 0, deve-se incrementar CONT na borda de subida de CLK e, se DR = 1, deve-se decrementar.
Uma interrupção por variação de CLK é invocada 6 vezes ao se girar o bastão do codificador no sentido da esquerda para a direita e mais 2 vezes ao se girar o bastão do codificador no sentido da direita para a esquerda.
Com o procedimento descrito, o novo valor de CONT é
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento de Instrumentação Científica para Projetos Espaciais |
Q2523543
Engenharia Eletrônica
O principal objetivo durante o projeto de amplificadores de RF é alcançar o máximo ganho de potência dentro de uma margem calculável de estabilidade.
Sobre a estabilidade de amplificadores de RF, analise as afirmativas a seguir e assinale (V) para a verdadeira e (F) para a falsa.
( ) Um amplificador estável é aquele que é livre de oscilações indesejáveis, isto é, não produzirá sinais por si só, exceto no caso de ruídos.
( ) O fator de estabilidade de Linvill é um importante indicador de estabilidade do amplificador, tomado com ambas portas de entrada e saída do amplificador em circuito aberto.
( ) Amplificadores de RF são menos sujeitos a oscilações indesejáveis do que amplificadores de áudio, devido a frequências de operação maiores.
As afirmativas são, respectivamente,
Sobre a estabilidade de amplificadores de RF, analise as afirmativas a seguir e assinale (V) para a verdadeira e (F) para a falsa.
( ) Um amplificador estável é aquele que é livre de oscilações indesejáveis, isto é, não produzirá sinais por si só, exceto no caso de ruídos.
( ) O fator de estabilidade de Linvill é um importante indicador de estabilidade do amplificador, tomado com ambas portas de entrada e saída do amplificador em circuito aberto.
( ) Amplificadores de RF são menos sujeitos a oscilações indesejáveis do que amplificadores de áudio, devido a frequências de operação maiores.
As afirmativas são, respectivamente,
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento de Instrumentação Científica para Projetos Espaciais |
Q2523542
Engenharia Eletrônica
Sobre o processo de conversão de frequências em sistemas de tecnologia RF, analise as afirmativas a seguir.
I. Na saída dos misturadores, geralmente deseja-se eliminar via filtragem as componentes da frequência do sinal original, seus harmônicos e sua soma, no caso dos circuitos transmissores.
II. Os elementos chaveadores que realizam o processo de conversão de frequências podem ser implementados com diodos ou transistores.
III. Os misturadores podem ser dos tipos simples, balanceado ou balanceado duplo, caso utilizem um, dois ou quatro elementos chaveadores, respectivamente.
Está correto o que se afirma em
I. Na saída dos misturadores, geralmente deseja-se eliminar via filtragem as componentes da frequência do sinal original, seus harmônicos e sua soma, no caso dos circuitos transmissores.
II. Os elementos chaveadores que realizam o processo de conversão de frequências podem ser implementados com diodos ou transistores.
III. Os misturadores podem ser dos tipos simples, balanceado ou balanceado duplo, caso utilizem um, dois ou quatro elementos chaveadores, respectivamente.
Está correto o que se afirma em
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento de Instrumentação Científica para Projetos Espaciais |
Q2523540
Engenharia Eletrônica
Um receptor super-heteródino é aquele que envolve um misturador para converter frequências dos sinais RF a partir das frequências soma e diferença com um oscilador local.
Com relação a esse receptor, analise as afirmativas a seguir.
I. A escolha adequada da frequência da seção de FI fixa, envolve, principalmente, minimizar a interferência e otimizar a seletividade do receptor.
II. Em projetos de receptores, é comum selecionar uma frequência acima da mais alta frequência de sinal transmitida, como frequência intermediária fixa.
III. Seu maior benefício é possibilitar uma seção de frequência intermediária de sintonia fixa, sintonizada diretamente na fábrica.
Está correto o que se afirma em
Com relação a esse receptor, analise as afirmativas a seguir.
I. A escolha adequada da frequência da seção de FI fixa, envolve, principalmente, minimizar a interferência e otimizar a seletividade do receptor.
II. Em projetos de receptores, é comum selecionar uma frequência acima da mais alta frequência de sinal transmitida, como frequência intermediária fixa.
III. Seu maior benefício é possibilitar uma seção de frequência intermediária de sintonia fixa, sintonizada diretamente na fábrica.
Está correto o que se afirma em
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento de Instrumentação Científica para Projetos Espaciais |
Q2523538
Engenharia Eletrônica
A escolha da classe do amplificador a ser utilizado depende dos requisitos da sua respectiva aplicação em RF. Alguns fenômenos, conhecidos como distorções, podem ser amenizados quando do emprego de determinada classe de amplificador.
Sobre as distorções do sinal em RF, analise as afirmativas a seguir e assinale (V) para a verdadeira e (F) para a falsa.
( ) Distorção harmônica é a geração de harmônicos da frequência do sinal de entrada no sinal de saída.
( ) A distorção de frequência ocorre quando o amplificador responde da mesma forma a diferentes frequências do sinal de entrada.
( ) Os amplificadores da classe AB corrigem a distorção de crossover, um fenômeno que surge quando os dois transistores entram na região de corte devido ao módulo do sinal de entrada não superar o módulo da tensão de polarização da junção baseemissor do transistor.
As afirmativas são, respectivamente,
Sobre as distorções do sinal em RF, analise as afirmativas a seguir e assinale (V) para a verdadeira e (F) para a falsa.
( ) Distorção harmônica é a geração de harmônicos da frequência do sinal de entrada no sinal de saída.
( ) A distorção de frequência ocorre quando o amplificador responde da mesma forma a diferentes frequências do sinal de entrada.
( ) Os amplificadores da classe AB corrigem a distorção de crossover, um fenômeno que surge quando os dois transistores entram na região de corte devido ao módulo do sinal de entrada não superar o módulo da tensão de polarização da junção baseemissor do transistor.
As afirmativas são, respectivamente,
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento de Instrumentação Científica para Projetos Espaciais |
Q2523537
Engenharia Eletrônica
Sobre os amplificadores usados em aplicações de RF, sabe-se que são divididos nas classes A, B, AB e C, de acordo com a porção do sinal de entrada que coloca os transistores do amplificador em condução.
Considerando um amplificador da classe C, seu ângulo de condução
Considerando um amplificador da classe C, seu ângulo de condução
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521667
Engenharia Eletrônica
Uma determinada indústria resolveu adicionar a sua planta um
processo que realiza o tratamento térmico de peças metálicas, para
que estas obtenham propriedades mecânicas desejadas. Esse
processo consiste na inserção de uma peça dentro de um forno
elétrico, cuja temperatura é controlada por um controlador do tipo
PI, de função de transferência dada por
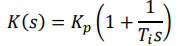
Após instalação do sistema, foi executado a função “autoajuste” presente no controlador PI, que estabeleceu um par de valores iniciais para as constantes Kp e Ti do respectivo controlador.
Em seguida, o sistema passou por um teste de validação, que consistiu na execução de um degrau na referência, com intuito de verificar como o sistema seguia a temperatura pré-determinada.
Ao analisar a resposta do sistema, verificou-se que a temperatura do forno possuía tempo de subida adequado, mas com tempo excessivo para eliminação de erro de estado estacionário.
Neste caso, para melhorar a resposta transitória desse sistema, se faz necessário
Após instalação do sistema, foi executado a função “autoajuste” presente no controlador PI, que estabeleceu um par de valores iniciais para as constantes Kp e Ti do respectivo controlador.
Em seguida, o sistema passou por um teste de validação, que consistiu na execução de um degrau na referência, com intuito de verificar como o sistema seguia a temperatura pré-determinada.
Ao analisar a resposta do sistema, verificou-se que a temperatura do forno possuía tempo de subida adequado, mas com tempo excessivo para eliminação de erro de estado estacionário.
Neste caso, para melhorar a resposta transitória desse sistema, se faz necessário
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521664
Engenharia Eletrônica
Em testes de comissionamento de sistemas de controle em operação
é comum aplicar sinais do tipo degrau e rampa, uma vez que essas
respostas temporais contêm características do desempenho do
sistema em regime permanente.
Considere um sistema de controle com realimentação unitária, cuja função de transferência de malha aberta possui um polo na origem.
Quanto ao erro de regime permanente ao seguir sinais do tipo degrau e rampa, esse sistema apresentará
Considere um sistema de controle com realimentação unitária, cuja função de transferência de malha aberta possui um polo na origem.
Quanto ao erro de regime permanente ao seguir sinais do tipo degrau e rampa, esse sistema apresentará
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521663
Engenharia Eletrônica
Antes de proporcionar o desempenho desejado a determinado
sistema dinâmico controlado, o controlador deve garantir que o
referido sistema seja estável em malha fechada.
Considere que determinado sistema de controle é representado pela sua função de transferência de malha aberta M(s), dada por

Com relação a estabilidade deste sistema, analise as afirmativas a seguir.
I. É independente do valor do parâmetro k.
II. É independente do valor do parâmetro a.
III. É independente dos valores dos parâmetros b e c.
Está correto o que se afirma em
Considere que determinado sistema de controle é representado pela sua função de transferência de malha aberta M(s), dada por
Com relação a estabilidade deste sistema, analise as afirmativas a seguir.
I. É independente do valor do parâmetro k.
II. É independente do valor do parâmetro a.
III. É independente dos valores dos parâmetros b e c.
Está correto o que se afirma em
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521660
Engenharia Eletrônica
Uma das grandes vantagens do controle por realimentação de
estados é a de garantir total controle da dinâmica do sistema,
permitindo alocar todos os polos do sistema em posições desejadas
pelo projetista, desde que o sistema em questão seja controlável.
Considere um sistema dinâmico em malha aberta dado pela seguinte
equação:

em que x1, x2 são estados e u a entrada.
Após a inserção de um controlador por realimentação de estados de ganho K = [2 4] , o sistema em malha fechada passa a ter polos em
em que x1, x2 são estados e u a entrada.
Após a inserção de um controlador por realimentação de estados de ganho K = [2 4] , o sistema em malha fechada passa a ter polos em
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521659
Engenharia Eletrônica
Desde que associado a um confiável e robusto observador de
estados, o controle por realimentação de estados observado
consegue alcançar especificações de desempenho geralmente
superiores as atingidas por controladores de realimentação de saída
sintetizados sob o paradigma do controle clássico.
Com relação às características do controle por realimentação de estados observados de ordem completa, analise as afirmativas a seguir.
I. A dinâmica do observador não é observável do ponto de vista de entrada e saída da planta.
II. A ordem do controlador é sempre superior à ordem da planta.
III. O ganho do regulador interfere na alocação de polos da planta.
Está correto o que se afirma em
Com relação às características do controle por realimentação de estados observados de ordem completa, analise as afirmativas a seguir.
I. A dinâmica do observador não é observável do ponto de vista de entrada e saída da planta.
II. A ordem do controlador é sempre superior à ordem da planta.
III. O ganho do regulador interfere na alocação de polos da planta.
Está correto o que se afirma em
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521658
Engenharia Eletrônica
Um dos principais obstáculos na implementação de um controlador
por realimentação de estados é que raramente todos os estados de
uma planta real podem ser diretamente obtidos, onde muitas vezes
é até impossível o sensoriamento de alguns estados internos da
dinâmica em questão.
Uma maneira de contornar esse problema é fazer uso de um observador de estado de ordem completa, cuja matriz de ganhos do observador (comumente associada a letra L) tem a função de
Uma maneira de contornar esse problema é fazer uso de um observador de estado de ordem completa, cuja matriz de ganhos do observador (comumente associada a letra L) tem a função de
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521657
Engenharia Eletrônica
A transformada de Laplace é extensamente utilizada em sistemas de
controle, uma vez que os principais métodos clássicos de análise e
síntese são realizados no domínio da frequência. Corroborando com
essa prática, verifica-se que muitas características da resposta
temporal podem ser inferidas diretamente e até mais facilmente no
domínio da frequência, sem a necessidade de se computar a
transformada inversa de Laplace.
Considere um sistema de controle que, após ser excitado por um sinal de banda estreita, produz um sinal de saída y(t) com a seguinte representação no domínio da frequência:

Os valores de y(t) para t = 0 e t → ∞ são, respectivamente,
Considere um sistema de controle que, após ser excitado por um sinal de banda estreita, produz um sinal de saída y(t) com a seguinte representação no domínio da frequência:
Os valores de y(t) para t = 0 e t → ∞ são, respectivamente,