Questões de Concurso
Para mecatrônica
Foram encontradas 110 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Q2166826
Mecatrônica
Tomando por base a norma ISO 1219, o desenho abaixo apresenta um circuito pneumático
contendo uma válvula conectada a um cilindro pneumático. 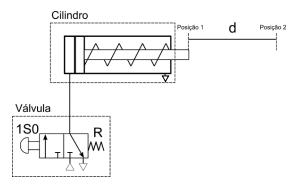
Com relação a esse circuito pneumático, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) A válvula é direcional do tipo 3/2. ( ) A válvula tem acionamento mecânico e retorno por mola. ( ) A válvula é normalmente fechada de controle por solenoide. ( ) O cilindro tem retorno por mola. ( ) Quando o acionamento 1S0 for ativado, o pistão do cilindro avança linearmente até a posição 2 e retorna automaticamente até a posição 1, repetindo esse ciclo até que 1S0 seja desativado.
Com relação a esse circuito pneumático, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) A válvula é direcional do tipo 3/2. ( ) A válvula tem acionamento mecânico e retorno por mola. ( ) A válvula é normalmente fechada de controle por solenoide. ( ) O cilindro tem retorno por mola. ( ) Quando o acionamento 1S0 for ativado, o pistão do cilindro avança linearmente até a posição 2 e retorna automaticamente até a posição 1, repetindo esse ciclo até que 1S0 seja desativado.
Q2166825
Mecatrônica
As redes de comunicação para automação industrial são classificadas em Sensorbus, Devicebus e
Fieldbus, de acordo com o tipo de controle, de dispositivos e de mensagens para os quais são
concebidas. Em relação a essa classificação, analise as afirmativas abaixo e assinale a alternativa
correta.
I. As redes ASi são um exemplo típico de Sensorbus voltadas à comunicação de sensores e atuadores discretos.
II. As Devicebus são especificadas para comunicação de controladores lógicos programáveis e outros dispositivos de automação industrial cujas mensagens são predominantemente organizadas em bytes.
III. As altas taxas de transmissão de dados das redes Fieldbus garantem que os sinais digitais sejam transmitidos em tempo real entre os sensores e atuadores distribuídos nas malhas de controle do processo industrial.
IV. As barreiras de segurança intrínseca das redes Fieldbus permitem que estratégias de controle e de segurança sejam executas localmente nos atuadores instalados em áreas classificadas, sujeitas a risco de incêndio e explosão.
I. As redes ASi são um exemplo típico de Sensorbus voltadas à comunicação de sensores e atuadores discretos.
II. As Devicebus são especificadas para comunicação de controladores lógicos programáveis e outros dispositivos de automação industrial cujas mensagens são predominantemente organizadas em bytes.
III. As altas taxas de transmissão de dados das redes Fieldbus garantem que os sinais digitais sejam transmitidos em tempo real entre os sensores e atuadores distribuídos nas malhas de controle do processo industrial.
IV. As barreiras de segurança intrínseca das redes Fieldbus permitem que estratégias de controle e de segurança sejam executas localmente nos atuadores instalados em áreas classificadas, sujeitas a risco de incêndio e explosão.
Q2166822
Mecatrônica
Indique se as afirmativas a seguir, a respeito de controladores lógicos programáveis (CLPs)
usados em automação industrial, são verdadeiras (V) ou falsas (F) e assinale a alternativa com a
sequência correta de cima para baixo.
( ) A norma IEC 61131-3 especifica estas cinco linguagens para programação de CLP: Assembly, C, Diagrama de Contatos (Ladder Diagram), Diagrama de Blocos (Function Block Diagram) e Diagrama Sequencial (Sequencial Flow Chart).
( ) Em operação normal (modo RUN), o CLP realiza periodicamente o ciclo de varredura que basicamente grava as informações das portas de entradas nas respectivas memórias-imagem, processa a lógica programada e só então atualiza as portas de saída de acordo com o estado das respectivas memórias-imagem.
( ) Em razão da confiabilidade operacional, do alto desempenho de seus processadores, da alta capacidade de memória e do baixo custo, os CLPs industriais são os dispositivos mais indicados para o processamento de imagens em equipamentos de controle de qualidade da produção.
( ) Segundo a norma IEC 61131-3, a programação de CLPs em Diagrama de Contatos (Ladder Diagram) segue a mesma lógica de um circuito elétrico de relés, de modo que uma mudança na ordem em que os degraus (rungs) são programados no diagrama não pode alterar o comportamento gerado pelo CLP.
( ) A norma IEC 61131-3 especifica estas cinco linguagens para programação de CLP: Assembly, C, Diagrama de Contatos (Ladder Diagram), Diagrama de Blocos (Function Block Diagram) e Diagrama Sequencial (Sequencial Flow Chart).
( ) Em operação normal (modo RUN), o CLP realiza periodicamente o ciclo de varredura que basicamente grava as informações das portas de entradas nas respectivas memórias-imagem, processa a lógica programada e só então atualiza as portas de saída de acordo com o estado das respectivas memórias-imagem.
( ) Em razão da confiabilidade operacional, do alto desempenho de seus processadores, da alta capacidade de memória e do baixo custo, os CLPs industriais são os dispositivos mais indicados para o processamento de imagens em equipamentos de controle de qualidade da produção.
( ) Segundo a norma IEC 61131-3, a programação de CLPs em Diagrama de Contatos (Ladder Diagram) segue a mesma lógica de um circuito elétrico de relés, de modo que uma mudança na ordem em que os degraus (rungs) são programados no diagrama não pode alterar o comportamento gerado pelo CLP.
Q2166821
Mecatrônica
Considerando a organização de um sistema computacional básico, relacione os termos da coluna
1 às definições da coluna 2 e assinale a alternativa com a sequência correta de cima para baixo.
Coluna 1 I. ULA II. Unidade de controle III. Unidade de memória IV. Unidade de entrada V. Seção de registradores
Coluna 2 ( ) Conjunto de dispositivos usados para obter dados externos ao computador.
( ) Elemento de um microcomputador responsável por armazenar programas e dados que podem ou não ser alterados pelo microprocessador.
( ) Área de um microprocessador que realiza operações aritméticas e lógicas sobre os dados.
( ) Área de um microprocessador responsável por gerar os sinais apropriados para execução das instruções.
( ) Área de um microprocessador com grupos de flip-flops que realizam diversas funções de contagem e armazenamento temporário de dados, instruções e endereços de memória durante a execução de programas.
Coluna 1 I. ULA II. Unidade de controle III. Unidade de memória IV. Unidade de entrada V. Seção de registradores
Coluna 2 ( ) Conjunto de dispositivos usados para obter dados externos ao computador.
( ) Elemento de um microcomputador responsável por armazenar programas e dados que podem ou não ser alterados pelo microprocessador.
( ) Área de um microprocessador que realiza operações aritméticas e lógicas sobre os dados.
( ) Área de um microprocessador responsável por gerar os sinais apropriados para execução das instruções.
( ) Área de um microprocessador com grupos de flip-flops que realizam diversas funções de contagem e armazenamento temporário de dados, instruções e endereços de memória durante a execução de programas.
Q2166820
Mecatrônica
As saídas digitais de controladores lógicos programáveis (CLPs) são utilizadas para acionar
diversos tipos de atuadores discretos, como válvulas solenoides, motores e lâmpadas. Existem
basicamente três classes: saídas a relé, saídas a transistor e saídas a tiristor. Indique se as
afirmativas a seguir, a respeito de saídas digitais de CLPs, são verdadeiras (V) ou falsas (F) e
assinale a alternativa com a sequência correta de cima para baixo.
( ) As saídas a relé podem atuar em uma ampla faixa de tensão e corrente, o que reduz a necessidade de circuitos auxiliares.
( ) As saídas a transistor são especificadas para comutar tanto circuitos em corrente contínua quanto em corrente alternada.
( ) Por serem baseadas em elementos estáticos, as saídas a transistor possuem maior velocidade de comutação que as saídas a relé.
( ) Por serem baseadas em elementos eletromecânicos, as saídas a tiristor possuem menor vida útil que as saídas a relé.
( ) As saídas a relé podem atuar em uma ampla faixa de tensão e corrente, o que reduz a necessidade de circuitos auxiliares.
( ) As saídas a transistor são especificadas para comutar tanto circuitos em corrente contínua quanto em corrente alternada.
( ) Por serem baseadas em elementos estáticos, as saídas a transistor possuem maior velocidade de comutação que as saídas a relé.
( ) Por serem baseadas em elementos eletromecânicos, as saídas a tiristor possuem menor vida útil que as saídas a relé.
Q2166819
Mecatrônica
A figura abaixo mostra um conversor analógico-digital de rampa digital que monitora a tensão VB
de uma bateria de 12 V. A saída do conversor é um número binário de 4 bits, ABCD, que
corresponde à tensão da bateria em degraus de 1 V, sendo A o bit mais significativo (MSB). As
saídas binárias do conversor A/D são ligadas em um circuito lógico que produz uma saída Z. 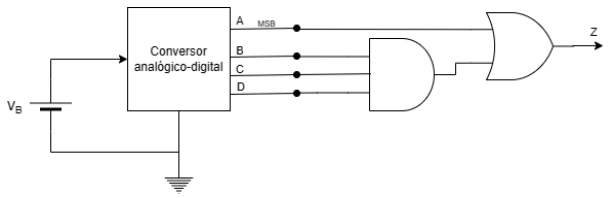
A saída Z é ativada em nível ALTO se e somente se a tensão da bateria VB for maior que:
A saída Z é ativada em nível ALTO se e somente se a tensão da bateria VB for maior que:
Q2166818
Mecatrônica
Considere o seguinte circuito digital, composto por três portas lógicas NAND:
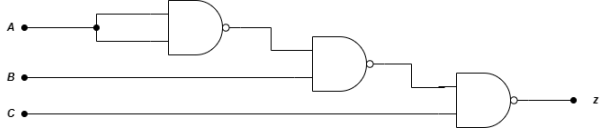
Qual expressão booleana é implementada por esse circuito?
Q2166817
Mecatrônica
A corrente no secundário de um transformador ideal de 13.200/220 V é de 30 A. A razão de
espiras do transformador, a potência aparente que está sendo transmitida e a corrente no primário
são dadas por:
Q2166816
Mecatrônica
Com o objetivo de determinar a potência de uma carga monofásica, os valores de tensão e
corrente eficazes foram medidos, obtendo-se 220 V e 30 A, respectivamente. Sabendo-se que o
fator de potência da carga é 0,9 indutivo, a potência ativa dissipada pela carga é dada por:
Q2166815
Mecatrônica
Em relação a circuitos elétricos trifásicos, analise as afirmativas a seguir e assinale a alternativa
correta.
I. Apenas dois wattímetros são necessários para medir a potência média total absorvida por uma carga trifásica.
II. A sequência de fase é a ordem em que as tensões das fases de um gerador trifásico ocorrem em relação ao tempo. Em uma sequência abc de tensões balanceadas de um gerador trifásico, a tensão da fase A está adiantada 120 graus da tensão da fase B, que, por sua vez, está 120 graus adiantada da tensão da fase C.
III. Em um sistema trifásico, tanto a fonte quanto a carga podem ser conectadas em triângulo ou em estrela.
IV. Tensões de fase balanceadas são iguais em amplitude e fora de fase uma das outras em 120 graus.
I. Apenas dois wattímetros são necessários para medir a potência média total absorvida por uma carga trifásica.
II. A sequência de fase é a ordem em que as tensões das fases de um gerador trifásico ocorrem em relação ao tempo. Em uma sequência abc de tensões balanceadas de um gerador trifásico, a tensão da fase A está adiantada 120 graus da tensão da fase B, que, por sua vez, está 120 graus adiantada da tensão da fase C.
III. Em um sistema trifásico, tanto a fonte quanto a carga podem ser conectadas em triângulo ou em estrela.
IV. Tensões de fase balanceadas são iguais em amplitude e fora de fase uma das outras em 120 graus.
Q2166814
Mecatrônica
Em relação a elementos de circuito passivos, analise as afirmativas a seguir e assinale a
alternativa correta.
I. A equação do capacitor é dada por i= C dv/dt, em que C é a capacitância, cuja unidade de medida é o farad (F).
II. A equação do indutor é dada por v = L di/dt, em que L é a indutância, cuja unidade de medida é o henry (H).
III. A capacitância equivalente, Ceq, de dois capacitores em conectados em série, C1 e C2, é dada por Ceq= C1 + C2.
IV. Capacitores são usados para armazenar energia na forma de campo elétrico, enquanto indutores podem armazenar energia na forma de campo magnético.
V. A energia armazenada em um capacitor é dada por wC = 1/2 Cv2 e a energia armazenada por um indutor é dada por wL = 1/2 Li2.
I. A equação do capacitor é dada por i= C dv/dt, em que C é a capacitância, cuja unidade de medida é o farad (F).
II. A equação do indutor é dada por v = L di/dt, em que L é a indutância, cuja unidade de medida é o henry (H).
III. A capacitância equivalente, Ceq, de dois capacitores em conectados em série, C1 e C2, é dada por Ceq= C1 + C2.
IV. Capacitores são usados para armazenar energia na forma de campo elétrico, enquanto indutores podem armazenar energia na forma de campo magnético.
V. A energia armazenada em um capacitor é dada por wC = 1/2 Cv2 e a energia armazenada por um indutor é dada por wL = 1/2 Li2.
Q2166813
Mecatrônica
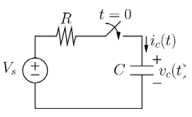
Considere o circuito apresentado na figura a seguir, em que VS é a tensão da fonte e vc(t) é a
tensão no capacitor. Suponha que o capacitor esteja completamente descarregado em t = 0. As
equações que descrevem o comportamento da tensão vc(t) e a corrente ic(t) no capacitor para
t > 0 são dadas por:
Q2166812
Mecatrônica
Considere um circuito em corrente contínua com uma fonte de tensão (V) em série com uma
resistência constante (R) e uma resistência variável (RL), chamada de “carga”. Qual deve ser a
relação entre as resistências para que a maior potência possível (pmax) seja transferida para a
carga e qual é o valor dessa potência em função da tensão da fonte V e da resistência da carga RL?
Q2166811
Mecatrônica
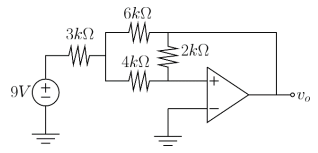
Considere o circuito da figura a seguir. Sabendo que a tensão de entrada é 9 V, qual é o valor da
tensão de saída vo?
Q2166810
Mecatrônica
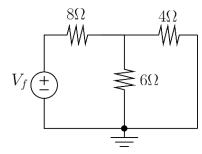
Considere o circuito apresentado na figura a seguir. O resistor de 4 Ω dissipa uma potência de
144 W. Qual é a tensão fornecida pela fonte Vf?
Q2033979
Mecatrônica
A potência desenvolvida em um resistor é
dada por p = 0,5i 3
. A potência média (em
Watts) quando varia de 1A a 3A é:
Ano: 2021
Banca:
FGV
Órgão:
IMBEL
Prova:
FGV - 2021 - IMBEL - Engenheiro Mecatrônico - Reaplicação |
Q1847214
Mecatrônica
No circuito combinacional a seguir,

onde A, B e F são variáveis booleanas, a expressão correta e simplificada para F é
Ano: 2021
Banca:
FGV
Órgão:
IMBEL
Prova:
FGV - 2021 - IMBEL - Engenheiro Mecatrônico - Reaplicação |
Q1847213
Mecatrônica
Para uma arquitetura de computadores do tipo MIPS (milhões de
instruções por segundo), comumente usada nos desktops e
laptops, avalie as afirmativas a seguir.
I. A Unidade de Controle (UC) é utilizada para o sequenciamento das instruções da máquina, gerando os sinais de controle necessários para cada etapa do ciclo de instrução. II. A UC está localizada no chipset de controle de barramento da placa mãe. III. O circuito lógico digital, normalmente utilizado para sua implementação, é o decodificador, que recebe o campo OP ou OpCode da instrução e os codifica em sinais de controle para os outros dispositivos.
Está correto o que se afirma em
I. A Unidade de Controle (UC) é utilizada para o sequenciamento das instruções da máquina, gerando os sinais de controle necessários para cada etapa do ciclo de instrução. II. A UC está localizada no chipset de controle de barramento da placa mãe. III. O circuito lógico digital, normalmente utilizado para sua implementação, é o decodificador, que recebe o campo OP ou OpCode da instrução e os codifica em sinais de controle para os outros dispositivos.
Está correto o que se afirma em
Ano: 2021
Banca:
FGV
Órgão:
IMBEL
Prova:
FGV - 2021 - IMBEL - Engenheiro Mecatrônico - Reaplicação |
Q1847211
Mecatrônica
Sobre os sensores de força e momento, no contexto do punho de
um manipulador robótico, assinale a afirmativa incorreta.
Ano: 2021
Banca:
FGV
Órgão:
IMBEL
Prova:
FGV - 2021 - IMBEL - Engenheiro Mecatrônico - Reaplicação |
Q1847210
Mecatrônica
Sobre a estrutura de dados árvore AVL, analise as afirmativas a
seguir. I. Ela é uma árvore binária.
II. Seu nó raiz, se possui subárvore (à direita ou esquerda), ela é
binária.
III. Ela não é, necessariamente, uma árvore completa.
IV. Se sua altura é h, a altura das subárvores da raiz, à esquerda e
à direita, respectivamente, podem ser h – 1 e h – 2.
V. A operação completa de inserção de um nó tem, no pior caso,
complexidade de ordem constante O(1).
Está correto somente o que se afirma em
Está correto somente o que se afirma em