Foram encontradas 10.730 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
• 4 mA corresponde a 0,0 m.
• 20 mA corresponde a 5,0 m.
• O CAD utiliza todos os níveis disponíveis para essa faixa.
• Desprezam-se erros de linearidade, offset, ganho e ruídos, considerando apenas a limitação de resolução.
Durante um ensaio, deseja-se avaliar se esse sistema é capaz de distinguir variações muito pequenas de nível no reservatório para fins de controle fino. Com base nessas informações, assinale a alternativa correta sobre a resolução do sistema de digitalização e sua implicação prática na automação.
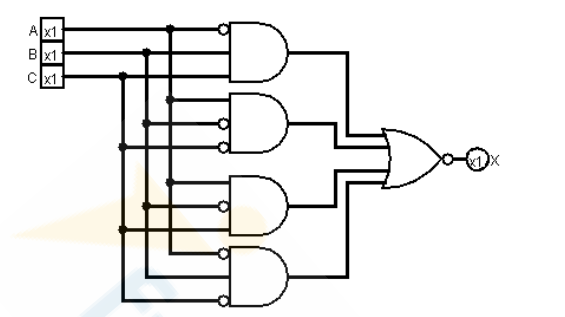
Qual é a tabela verdade que representa o seu comportamento?
• Faixa de pressão: 0 a 16 bar.
• Transmissor: 4–20 mA linear.
• Resistência total do cabo (ida+volta): 18 Ω.
• Fonte do loop: 24 Vcc.
A entrada 0–10 V do CLP tem impedância alta (pode desprezar a corrente de entrada). O objetivo é usar o máximo possível da faixa 0–10 V sem saturar a entrada do CLP em 20 mA. Qual alternativa apresenta o valor de shunt mais adequado e a tensão esperada na entrada do CLP quando a pressão é 12 bar, além de avaliar corretamente o efeito do cabo no erro de leitura?
• Opção A: transmissor 2 fios em 4–20 mA alimentado em 24 Vcc, com leitura no CLP via resistor shunt de 250 Ω (convertendo corrente em tensão).
• Opção B: sensor com saída 0–10 V (3 fios), lida diretamente por uma entrada analógica de tensão do CLP.
Considere para a análise:
• Resistência elétrica do cabo (ida + volta) ≈ 12 Ω no total (no percurso).
• Corrente do loop na Opção A varia de 4 mA (0%) a 20 mA (100%).
• O CLP na Opção A mede a tensão no shunt de 250 Ω.
• Na Opção B, o sensor tenta impor 0–10 V no borne de entrada do CLP referenciado ao comum.
Com base no apresentado, assinale a alternativa correta sobre o comportamento dos sinais 4–20 mA e 0–10 V nesse cenário (distância + ruído), considerando também o shunt de 250 Ω na entrada do CLP.
Em circuitos digitais combinacionais, os somadores completos são blocos lógicos capazes de realizar a soma de duas variáveis, sendo alguns de dois bits certos contando com um bit de transporte de entrada, normalmente indicado por carry-in (Cin). Como resultado, o circuito produz duas saídas: a soma (S) e o transporte de saída (Cout), conforme a figura abaixo:
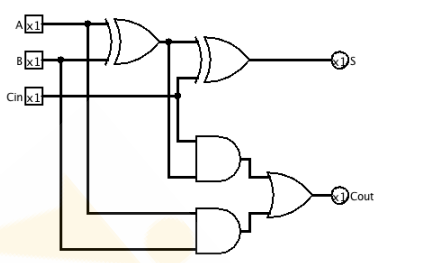
Com base na figura, em que se observa um desses circuitos, e nos fundamentos de circuitos digitais com portas lógicas, assinale a alternativa correta sobre o funcionamento do circuito apresentado.
( ) Realiza filtragem, removendo impurezas e separando umidade.
( ) Regula pressão para adequar à aplicação.
( ) Inclui lubrificação conforme circuito/componentes.
( ) Preserva componentes, reduz contaminantes e aumenta vida útil.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
( ) Protocolo influencia velocidade de atualização das telas por encapsulamento e eficiência de transmissão.
( ) Redes congestionadas causam atraso em leitura/escrita de variáveis com excesso de tags/polling.
( ) Comunicação CLP-IHM é desnecessária; IHM supervisiona sem acesso às variáveis do CLP.
( ) Taxa de atualização da IHM causa defasagem visual, mesmo com CLP executando corretamente.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
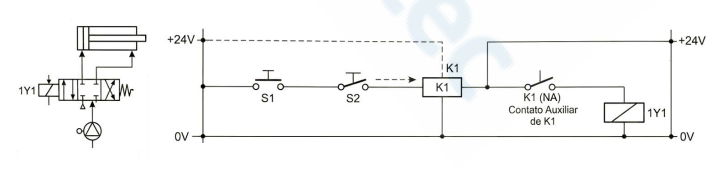
( ) O intertravamento elétrico atua no circuito de comando, normalmente por meio de contatos auxiliares, para impedir a energização simultânea de contatores incompatíveis.
( ) O intertravamento mecânico impede fisicamente o fechamento simultâneo de dois contatores, funcionando como proteção adicional ao intertravamento elétrico.
( ) Em sistemas de reversão de motores, o uso exclusivo do intertravamento mecânico torna desnecessário qualquer cuidado no circuito de comando.
( ) A aplicação conjunta de intertravamento elétrico e mecânico aumenta a segurança operacional do sistema.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
( ) A velocidade síncrona depende da frequência da rede e do número de polos do motor.
( ) A velocidade real do rotor, em operação, é ligeiramente menor que a velocidade síncrona.
( ) O escorregamento de um motor de indução em operação normal é igual a zero.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
( ) A velocidade do motor é controlada variando a frequência de saída do inversor.
( ) Parametrização inclui dados nominais (tensão, corrente, frequência) para proteção.
( ) Rampas curtas de aceleração/desaceleração reduzem solicitação elétrica/mecânica.
( ) Frequência máxima define limite superior de velocidade do motor.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
( ) Em motores trifásicos, trocar duas fases da alimentação inverte o sentido de rotação.
( ) Intertravamento entre contatores evita acionamento simultâneo e curtos-circuitos.
( ) Em monofásicos com capacitor de partida, inverter rede basta para reversão.
( ) Em monofásicos com chave centrífuga, inverter ligação principal/auxiliar preserva função da chave.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
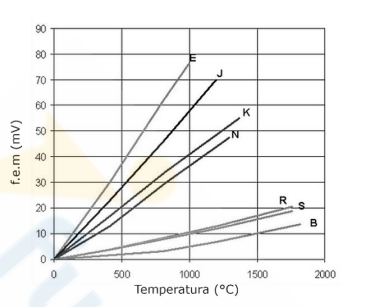
Com base na análise da figura e nos critérios técnicos de seleção de termopares, assinale a alternativa correta.
• LIGA o aquecedor quando T ≤ 58 °C.
• DESLIGA o aquecedor quando T ≥ 62 °C.
Assuma que:
• O sensor é adequado e sem falhas.
• O sistema térmico é lento (há inércia térmica).
• Não há modulação de potência: apenas ligado ou desligado.
Assinale a alternativa que descreve corretamente o efeito principal da histerese nesse controle.
Durante a calibração e validação de um sistema de detecção de presença em uma linha de produção automatizada, um técnico de automação precisa verificar a integridade do circuito de alimentação de sensores indutivos. Ao analisar o projeto elétrico, identifica que três sensores indutivos de proximidade (24 Vcc, 200 mA cada) estão conectados em paralelo alimentados por uma fonte de 24 Vcc com capacidade máxima de 1 A. Para garantir que o circuito opere dentro dos limites de segurança e confiabilidade, o técnico avalia alguns critérios sobre o comportamento de circuitos em paralelo. Diante desse contexto, analise as assertivas abaixo, assinalando V, se verdadeiras, ou F, se falsas.
( ) Em uma associação em paralelo, a diferença de potencial (tensão) é idêntica em todos os ramos do circuito.
( ) A corrente total fornecida pela fonte é igual à soma algébrica das correntes individuais de cada ramo.
( ) A resistência equivalente de um circuito em paralelo é sempre inferior à menor resistência individual do conjunto.
( ) Ao desconectar um dos sensores do circuito, a resistência equivalente total aumenta.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é: