Questões de Concurso
Foram encontradas 2.636 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Elétrica 2011 |
Q237879
Engenharia Eletrônica
Seja f : [0, +∞) → ℜ uma função, seccionalmente contínua e de ordem exponencial, cuja Transformada de Laplace é F (s) =  e -st .f(t) dt = e-s/s2 para s > 0.
e -st .f(t) dt = e-s/s2 para s > 0.
Dentre os gráficos abaixo, qual o que melhor se aproxima do gráfico da função f(t)?
e -st .f(t) dt = e-s/s2 para s > 0.Dentre os gráficos abaixo, qual o que melhor se aproxima do gráfico da função f(t)?
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobrás - Engenheiro de Processamento Júnior |
Q188363
Engenharia Eletrônica
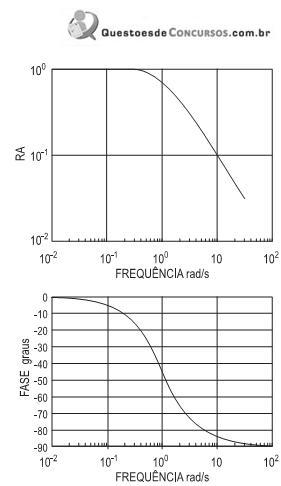
A figura acima representa o diagrama de Bodé de um determinado sistema. Tendo-a como referência, analise as proposições a seguir.
I - O sistema representado é de primeira ordem.
II - O sistema representado é de segunda ordem.
III - A frequência de quebra deste sistema corresponde à fase de 45 graus.
IV - O sistema representado não tem tempo morto.
São corretas APENAS as proposições
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobrás - Engenheiro de Processamento Júnior |
Q188362
Engenharia Eletrônica
Texto associado

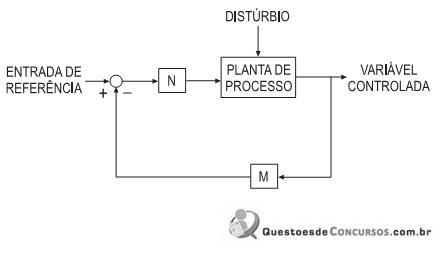
O diagrama de blocos acima representa um sistema de controle por realimentação de um determinado processo, cuja variável perturbadora é designada por u(t) e sua transformada de Laplace é U(s), em termos de variável-desvio. As funções de transferência do controlador, da válvula de controle e do sensor-transmissor estão representadas, respectivamente, por
O diagrama de blocos acima representa um sistema de controle por realimentação de um determinado processo, cuja variável perturbadora é designada por u(t) e sua transformada de Laplace é U(s), em termos de variável-desvio. As funções de transferência do controlador, da válvula de controle e do sensor-transmissor estão representadas, respectivamente, por
Considere que o controlador é proporcional puro e de ação reversa. Na hipótese de ocorrer uma perturbação degrau de 2 unidades em u, analise as decorrências abaixo.
I - A resposta da variável controlada será estável para qualquer valor de .
.
II - Não haverá desvio permanente da variável controlada em relação ao valor desejado.
III - O desvio permanente da variável controlada em relação ao valor desejado será de 2 unidades, se o valor de for igual a 4.
for igual a 4.
IV - O desvio permanente na variável controlada em relação ao valor desejado será maior quanto menor for o valor do ganho do controlador.
São corretas APENAS a(s) decorrência(s)
I - A resposta da variável controlada será estável para qualquer valor de
. II - Não haverá desvio permanente da variável controlada em relação ao valor desejado.
III - O desvio permanente da variável controlada em relação ao valor desejado será de 2 unidades, se o valor de
for igual a 4. IV - O desvio permanente na variável controlada em relação ao valor desejado será maior quanto menor for o valor do ganho do controlador.
São corretas APENAS a(s) decorrência(s)
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobrás - Engenheiro de Processamento Júnior |
Q188361
Engenharia Eletrônica
Texto associado
O diagrama de blocos acima representa um sistema de controle por realimentação de um determinado processo, cuja variável perturbadora é designada por u(t) e sua transformada de Laplace é U(s), em termos de variável-desvio. As funções de transferência do controlador, da válvula de controle e do sensor-transmissor estão representadas, respectivamente, por
O diagrama de blocos acima representa um sistema de controle por realimentação de um determinado processo, cuja variável perturbadora é designada por u(t) e sua transformada de Laplace é U(s), em termos de variável-desvio. As funções de transferência do controlador, da válvula de controle e do sensor-transmissor estão representadas, respectivamente, por
A função de transferência em malha fechada entre a variável controlada y e a variável perturbadora u é definida por
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobrás - Engenheiro de Processamento Júnior |
Q188360
Engenharia Eletrônica
Texto associado
O diagrama de blocos acima representa um sistema de controle por realimentação de um determinado processo, cuja variável perturbadora é designada por u(t) e sua transformada de Laplace é U(s), em termos de variável-desvio. As funções de transferência do controlador, da válvula de controle e do sensor-transmissor estão representadas, respectivamente, por
O diagrama de blocos acima representa um sistema de controle por realimentação de um determinado processo, cuja variável perturbadora é designada por u(t) e sua transformada de Laplace é U(s), em termos de variável-desvio. As funções de transferência do controlador, da válvula de controle e do sensor-transmissor estão representadas, respectivamente, por
De acordo com as funções de transferência representadas no diagrama de blocos, analise as afirmativas a seguir.
I - O sensor-transmissor é muito rápido se comparado ao processo e, por isso, a sua função de transferência é representada apenas por um ganho.
II - A válvula de controle é do tipo ar-abre (ou falha fechada), porque o seu ganho é positivo.
III - Se , o controlador é do tipo PI, e a sua ação é reversa.
, o controlador é do tipo PI, e a sua ação é reversa.
Está correto o que se afirma em
I - O sensor-transmissor é muito rápido se comparado ao processo e, por isso, a sua função de transferência é representada apenas por um ganho.
II - A válvula de controle é do tipo ar-abre (ou falha fechada), porque o seu ganho é positivo.
III - Se
, o controlador é do tipo PI, e a sua ação é reversa. Está correto o que se afirma em
Ano: 2011
Banca:
CESGRANRIO
Órgão:
PETROQUÍMICA SUAPE
Prova:
CESGRANRIO - 2011 - PETROQUÍMICA SUAPE - Engenheiro de Manutenção Pleno - Elétrica |
Q187380
Engenharia Eletrônica
O GRAFCET é um método usado para representar graficamente a sequência de comandos de sistemas automatizados, com grande aplicação em programação de CLP. A figura a seguir apresenta três representações de diagramas de comandos GRAFCET.
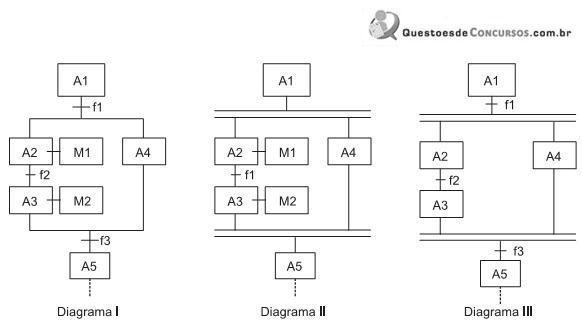
Dentre os diagramas apresentados acima, com base nas regras e nas técnicas de construção do GRAFCET, está correto APENAS o representado no diagrama
Dentre os diagramas apresentados acima, com base nas regras e nas técnicas de construção do GRAFCET, está correto APENAS o representado no diagrama
Ano: 2011
Banca:
CESGRANRIO
Órgão:
PETROQUÍMICA SUAPE
Prova:
CESGRANRIO - 2011 - PETROQUÍMICA SUAPE - Engenheiro de Manutenção Pleno - Elétrica |
Q187365
Engenharia Eletrônica

Para um dado valor de K, os polos complexos do sistema em malha fechada estão exatamente sobre o eixo imaginário. Assim sendo, haverá uma oscilação na saída do sistema, cuja frequência, em rad/s, é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
PETROQUÍMICA SUAPE
Prova:
CESGRANRIO - 2011 - PETROQUÍMICA SUAPE - Engenheiro de Manutenção Pleno - Elétrica |
Q187364
Engenharia Eletrônica
Qual o valor do ganho K para que o sistema em malha fechada esteja no limiar da instabilidade?
Ano: 2011
Banca:
CESGRANRIO
Órgão:
PETROQUÍMICA SUAPE
Prova:
CESGRANRIO - 2011 - PETROQUÍMICA SUAPE - Engenheiro de Manutenção Pleno - Elétrica |
Q187363
Engenharia Eletrônica
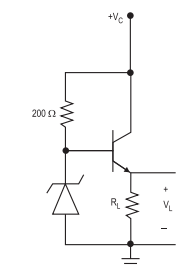
No circuito eletrônico da figura acima, todos os componentes são considerados ideais. O transistor opera com ganho β = 20 e V BE= 0,6 V. Sabe-se que o diodo Zener opera com tensão nominal de 6 V, que o circuito deve funcionar com a tensão VC podendo assumir valores entre 15 e 30 V e que a resistência de carga RL é incerta, podendo variar de 5 Ω até infinito (circuito sem carga). O projeto prevê que a tensão V L , com alguma tolerância, permaneça constante. Nesse contexto, o diodo Zener deverá ser especificado no projeto para suportar uma potência máxima, em W, de
Ano: 2011
Banca:
CESGRANRIO
Órgão:
PETROQUÍMICA SUAPE
Prova:
CESGRANRIO - 2011 - PETROQUÍMICA SUAPE - Operador Sênior |
Q186730
Engenharia Eletrônica
É objetivo de um controle, em processos industriais, manter os valores de suas variáveis dentro de uma faixa aceitável para sua operação. Nesse contexto, a figura acima representa um tipo de controle
Ano: 2011
Banca:
CESGRANRIO
Órgão:
PETROQUÍMICA SUAPE
Prova:
CESGRANRIO - 2011 - PETROQUÍMICA SUAPE - Instrumentista |
Q186384
Engenharia Eletrônica
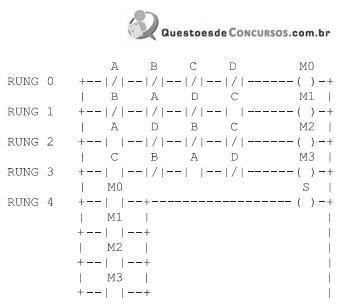
O programa em Ladder acima aciona a bobina S, obedecendo às condições dos contatos A, B, C e D. A simplificação desse programa está em
Q183720
Engenharia Eletrônica
Texto associado

Considerando que, no circuito acima, o amplificador operacional
seja ideal, julgue os itens subsecutivos.
Considerando que, no circuito acima, o amplificador operacional
seja ideal, julgue os itens subsecutivos.
Ao se conectar um acelerômetro na entrada  a saída
a saída  fornecerá a velocidade no ponto de medição.
fornecerá a velocidade no ponto de medição.
a saída fornecerá a velocidade no ponto de medição.
Q183719
Engenharia Eletrônica
Texto associado
Considerando que, no circuito acima, o amplificador operacional
seja ideal, julgue os itens subsecutivos.
Considerando que, no circuito acima, o amplificador operacional
seja ideal, julgue os itens subsecutivos.
Esse circuito pode ser considerado como a parte derivativa de um controlador PID.
Q183716
Engenharia Eletrônica
Texto associado

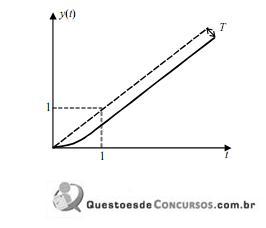
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
No domínio do tempo, a resposta do sistema em tela a uma entrada com forma de rampa unitária (linha pontilhada no gráfico abaixo) terá a forma da curva em linha contínua mostrada nesse mesmo gráfico.
Q183714
Engenharia Eletrônica
Texto associado
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
A função de transferência do sistema em tela entre a saída Y(s) e a entrada X(s) é igual a 
Q183711
Engenharia Eletrônica
Texto associado
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
Considerando que o sistema em tela utiliza um controlador do tipo proporcional, para reduzir o erro estacionário nesse processo, um procedimento recomendado é a substituição desse controlador por outro, mas do tipo derivativo.
Q183710
Engenharia Eletrônica
Acerca de equipamentos que utilizam sistemas de controle para o seu funcionamento, julgue o item abaixo.
As modernas máquinas de lavar roupa, em que é possível controlar desde a quantidade de água até o tempo do ciclo de lavagem, são modelos de sistemas de controle de malha fechada aplicado ao cotidiano.
As modernas máquinas de lavar roupa, em que é possível controlar desde a quantidade de água até o tempo do ciclo de lavagem, são modelos de sistemas de controle de malha fechada aplicado ao cotidiano.
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183152
Engenharia Eletrônica
Uma rotina manipuladora de interrupção de um processador x86, em um PC, termina com as seguintes instruções:
mov al,20h out 20h,al iret
Nesse contexto, considere as afirmativas abaixo.
I – A instrução out envia um comando de “Fim de Interrupção” ao Controlador de Interrupções, permitindo que esse possa realizar novos pedidos de interrupção à CPU.
II – A instrução iret vai habilitar a aceitação de novos pedidos de interrupção por parte da CPU, pois fará IF = 1.
III – A instrução iret fará com que a execução do programa principal interrompido seja retomada.
Está correto o que se afirma em
mov al,20h out 20h,al iret
Nesse contexto, considere as afirmativas abaixo.
I – A instrução out envia um comando de “Fim de Interrupção” ao Controlador de Interrupções, permitindo que esse possa realizar novos pedidos de interrupção à CPU.
II – A instrução iret vai habilitar a aceitação de novos pedidos de interrupção por parte da CPU, pois fará IF = 1.
III – A instrução iret fará com que a execução do programa principal interrompido seja retomada.
Está correto o que se afirma em
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183150
Engenharia Eletrônica
mov bl,50h movzx cx,bl mov bl,0A0h movsx ax,bl add ax,cx
As instruções movsx e movzx são utilizadas para fazer a cópia de dados de registradores de 8 bits, como BL, para registradores de 16 bits, como AX e CX, respectivamente com extensão de sinal (movsx) e com enchimento de zeros (movzx). O valor do registrador AX, ao final da execução da sequência de instruções acima, será
As instruções movsx e movzx são utilizadas para fazer a cópia de dados de registradores de 8 bits, como BL, para registradores de 16 bits, como AX e CX, respectivamente com extensão de sinal (movsx) e com enchimento de zeros (movzx). O valor do registrador AX, ao final da execução da sequência de instruções acima, será
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183149
Engenharia Eletrônica
Laço: Para inicialmente i = 0 e x = 0, enquanto i < 7 x = x * (-1) Se x < i então x = x + i Fim Se i = i + 1 Fim Laço
Após o laço acima, o valor de X será
Após o laço acima, o valor de X será