Selecionar segmento
Estude com questões de diferentes segmentos
Atenção: Isso limpará todos os campos já preenchidos no filtro!
Foram encontradas 329 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Elétrica 2011 |
Q237880
Engenharia Eletrônica
A função f : [0, + ∞ ) → ℜ é definida por f(t) = e2t sen (3t).
Se F(s)= e-st f(t) dt é a Transformada de Laplace da função f, então, para s > 2, F(s) é igual a
e-st f(t) dt é a Transformada de Laplace da função f, então, para s > 2, F(s) é igual a
Se F(s)=
e-st f(t) dt é a Transformada de Laplace da função f, então, para s > 2, F(s) é igual a
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Elétrica 2011 |
Q237879
Engenharia Eletrônica
Seja f : [0, +∞) → ℜ uma função, seccionalmente contínua e de ordem exponencial, cuja Transformada de Laplace é F (s) = e -st .f(t) dt = e-s/s2 para s > 0.
Dentre os gráficos abaixo, qual o que melhor se aproxima do gráfico da função f(t)?
e -st .f(t) dt = e-s/s2 para s > 0.Dentre os gráficos abaixo, qual o que melhor se aproxima do gráfico da função f(t)?
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobrás - Engenheiro de Processamento Júnior |
Q188363
Engenharia Eletrônica
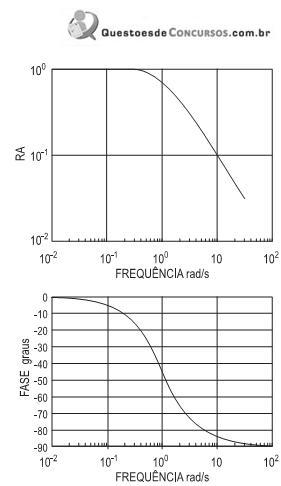
A figura acima representa o diagrama de Bodé de um determinado sistema. Tendo-a como referência, analise as proposições a seguir.
I - O sistema representado é de primeira ordem.
II - O sistema representado é de segunda ordem.
III - A frequência de quebra deste sistema corresponde à fase de 45 graus.
IV - O sistema representado não tem tempo morto.
São corretas APENAS as proposições
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobrás - Engenheiro de Processamento Júnior |
Q188362
Engenharia Eletrônica
Texto associado

O diagrama de blocos acima representa um sistema de controle por realimentação de um determinado processo, cuja variável perturbadora é designada por u(t) e sua transformada de Laplace é U(s), em termos de variável-desvio. As funções de transferência do controlador, da válvula de controle e do sensor-transmissor estão representadas, respectivamente, por
O diagrama de blocos acima representa um sistema de controle por realimentação de um determinado processo, cuja variável perturbadora é designada por u(t) e sua transformada de Laplace é U(s), em termos de variável-desvio. As funções de transferência do controlador, da válvula de controle e do sensor-transmissor estão representadas, respectivamente, por
Considere que o controlador é proporcional puro e de ação reversa. Na hipótese de ocorrer uma perturbação degrau de 2 unidades em u, analise as decorrências abaixo.
I - A resposta da variável controlada será estável para qualquer valor de .
.
II - Não haverá desvio permanente da variável controlada em relação ao valor desejado.
III - O desvio permanente da variável controlada em relação ao valor desejado será de 2 unidades, se o valor de for igual a 4.
for igual a 4.
IV - O desvio permanente na variável controlada em relação ao valor desejado será maior quanto menor for o valor do ganho do controlador.
São corretas APENAS a(s) decorrência(s)
I - A resposta da variável controlada será estável para qualquer valor de
. II - Não haverá desvio permanente da variável controlada em relação ao valor desejado.
III - O desvio permanente da variável controlada em relação ao valor desejado será de 2 unidades, se o valor de
for igual a 4. IV - O desvio permanente na variável controlada em relação ao valor desejado será maior quanto menor for o valor do ganho do controlador.
São corretas APENAS a(s) decorrência(s)
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobrás - Engenheiro de Processamento Júnior |
Q188361
Engenharia Eletrônica
Texto associado
O diagrama de blocos acima representa um sistema de controle por realimentação de um determinado processo, cuja variável perturbadora é designada por u(t) e sua transformada de Laplace é U(s), em termos de variável-desvio. As funções de transferência do controlador, da válvula de controle e do sensor-transmissor estão representadas, respectivamente, por
O diagrama de blocos acima representa um sistema de controle por realimentação de um determinado processo, cuja variável perturbadora é designada por u(t) e sua transformada de Laplace é U(s), em termos de variável-desvio. As funções de transferência do controlador, da válvula de controle e do sensor-transmissor estão representadas, respectivamente, por
A função de transferência em malha fechada entre a variável controlada y e a variável perturbadora u é definida por
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobrás - Engenheiro de Processamento Júnior |
Q188360
Engenharia Eletrônica
Texto associado
O diagrama de blocos acima representa um sistema de controle por realimentação de um determinado processo, cuja variável perturbadora é designada por u(t) e sua transformada de Laplace é U(s), em termos de variável-desvio. As funções de transferência do controlador, da válvula de controle e do sensor-transmissor estão representadas, respectivamente, por
O diagrama de blocos acima representa um sistema de controle por realimentação de um determinado processo, cuja variável perturbadora é designada por u(t) e sua transformada de Laplace é U(s), em termos de variável-desvio. As funções de transferência do controlador, da válvula de controle e do sensor-transmissor estão representadas, respectivamente, por
De acordo com as funções de transferência representadas no diagrama de blocos, analise as afirmativas a seguir.
I - O sensor-transmissor é muito rápido se comparado ao processo e, por isso, a sua função de transferência é representada apenas por um ganho.
II - A válvula de controle é do tipo ar-abre (ou falha fechada), porque o seu ganho é positivo.
III - Se , o controlador é do tipo PI, e a sua ação é reversa.
, o controlador é do tipo PI, e a sua ação é reversa.
Está correto o que se afirma em
I - O sensor-transmissor é muito rápido se comparado ao processo e, por isso, a sua função de transferência é representada apenas por um ganho.
II - A válvula de controle é do tipo ar-abre (ou falha fechada), porque o seu ganho é positivo.
III - Se
, o controlador é do tipo PI, e a sua ação é reversa. Está correto o que se afirma em
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183152
Engenharia Eletrônica
Uma rotina manipuladora de interrupção de um processador x86, em um PC, termina com as seguintes instruções:
mov al,20h out 20h,al iret
Nesse contexto, considere as afirmativas abaixo.
I – A instrução out envia um comando de “Fim de Interrupção” ao Controlador de Interrupções, permitindo que esse possa realizar novos pedidos de interrupção à CPU.
II – A instrução iret vai habilitar a aceitação de novos pedidos de interrupção por parte da CPU, pois fará IF = 1.
III – A instrução iret fará com que a execução do programa principal interrompido seja retomada.
Está correto o que se afirma em
mov al,20h out 20h,al iret
Nesse contexto, considere as afirmativas abaixo.
I – A instrução out envia um comando de “Fim de Interrupção” ao Controlador de Interrupções, permitindo que esse possa realizar novos pedidos de interrupção à CPU.
II – A instrução iret vai habilitar a aceitação de novos pedidos de interrupção por parte da CPU, pois fará IF = 1.
III – A instrução iret fará com que a execução do programa principal interrompido seja retomada.
Está correto o que se afirma em
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183150
Engenharia Eletrônica
mov bl,50h movzx cx,bl mov bl,0A0h movsx ax,bl add ax,cx
As instruções movsx e movzx são utilizadas para fazer a cópia de dados de registradores de 8 bits, como BL, para registradores de 16 bits, como AX e CX, respectivamente com extensão de sinal (movsx) e com enchimento de zeros (movzx). O valor do registrador AX, ao final da execução da sequência de instruções acima, será
As instruções movsx e movzx são utilizadas para fazer a cópia de dados de registradores de 8 bits, como BL, para registradores de 16 bits, como AX e CX, respectivamente com extensão de sinal (movsx) e com enchimento de zeros (movzx). O valor do registrador AX, ao final da execução da sequência de instruções acima, será
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183149
Engenharia Eletrônica
Laço: Para inicialmente i = 0 e x = 0, enquanto i < 7 x = x * (-1) Se x < i então x = x + i Fim Se i = i + 1 Fim Laço
Após o laço acima, o valor de X será
Após o laço acima, o valor de X será
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183148
Engenharia Eletrônica
Numa rotina implementada através de um serviço de interrupção por software, a passagem de parâmetros acontece via
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183147
Engenharia Eletrônica
Com relação ao uso de sub-rotinas por programas, analise as afirmativas a seguir.
I – Rotinas da API, que usam o recurso de “Chamadas ao Sistema” dos processadores x86, só podem receber um número fixo de parâmetros.
II – Funções de uma DLL escrita em Pascal, inviabilizam sua utilização por programas escritos em C.
III – Rotinas chamadas com empilhamento de parâmetros da direita para a esquerda podem receber um número variável de parâmetros.
Está correto o que se afirma em
I – Rotinas da API, que usam o recurso de “Chamadas ao Sistema” dos processadores x86, só podem receber um número fixo de parâmetros.
II – Funções de uma DLL escrita em Pascal, inviabilizam sua utilização por programas escritos em C.
III – Rotinas chamadas com empilhamento de parâmetros da direita para a esquerda podem receber um número variável de parâmetros.
Está correto o que se afirma em
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183146
Engenharia Eletrônica
Um registro de dados é composto, na seguinte ordem, por:
- 3 inteiros de 32 bits; -
1 vetor fixo de 3 caracteres;
1 vetor fixo de 2 inteiros de 16 bits.
Caso o compilador esteja alinhando seus dados por doublewords, o tamanho, em bytes, de uma variável desse tipo de registro é
- 3 inteiros de 32 bits; -
1 vetor fixo de 3 caracteres;
1 vetor fixo de 2 inteiros de 16 bits.
Caso o compilador esteja alinhando seus dados por doublewords, o tamanho, em bytes, de uma variável desse tipo de registro é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183143
Engenharia Eletrônica
No que diz respeito ao gerenciamento de memória realizado pelos sistemas operacionais, em sistemas batch, a organização de memória em partições fixas é simples e eficiente. Em sistemas time sharing, há mais usuários que memória suficiente para armazenar todos os processos, de forma que os excedentes devem ser mantidos em disco. Para rodar, tais processos devem ser trazidos para a memória. O movimento de processos entre a memória e o disco e vice-versa é denominado
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183142
Engenharia Eletrônica
Um autoteste nos sistemas operacionais é realizado, executando as seguintes rotinas quando um microcomputador é ligado: identificação de configuração, inicialização dos circuitos e do vídeo, teste de memória e teclado, carregamento do sistema operacional na DDR e entrega do controle do microprocessador ao sistema operacional.
Esse autoteste é denominado
Esse autoteste é denominado
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183141
Engenharia Eletrônica
Computadores possuem diversos recursos que só podem ser usados por um processo a cada vez. Considere um conjunto de processos no qual cada um está esperando por um evento que somente outro processo, pertencente ao conjunto, poderá fazer acontecer. Nesse contexto, pelo fato de todos os processos estarem esperando, nenhum deles poderá fazer acontecer qualquer um dos eventos que podem vir a acordar um dos demais membros do conjunto. Assim sendo, todos os processos do conjunto vão ficar eternamente bloqueados. Essa situação descrita é denominada
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183132
Engenharia Eletrônica
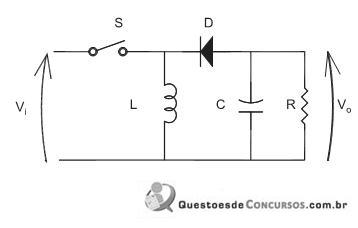
A figura acima apresenta um conversor buck boost, que opera com modulação por largura de pulso, onde o duty cycle D = 0,6. Para uma entrada DC Vi = 15 V e considerando o funcionamento do circuito em regime permanente, o valor médio da tensão de saída Vo, em volts, é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183130
Engenharia Eletrônica
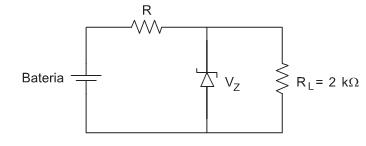
No circuito da figura acima, os valores de R e da tensão nominal do diodo zener, Vz, são desconhecidos. Para determiná-los, utilizaram-se duas baterias diferentes, verificando-se as potências dissipadas pelos resistores.
Os valores obtidos estão na tabela abaixo.
Bateria PR PRL 10 V 12 mW 8 mW 18 V 48 mW 18 mW
Com base nos dados acima apresentados, os valores de R e Vz são, respectivamente,
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183129
Engenharia Eletrônica
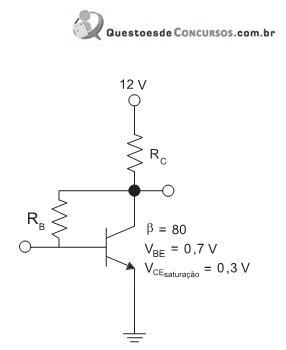
O circuito da figura acima mostra os dados de polarização de um transistor NPN. Para que a corrente CC de coletor seja de 2 mA e seja garantida uma excursão, no sinal de coletor, de 2 V (pico a pico), alcançando-se o limiar de transição para a região de saturação do transistor, os valores de RB e RC são, em kΩ respectivamente,
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183128
Engenharia Eletrônica
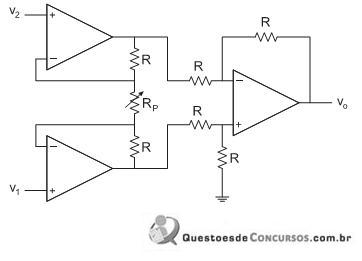
A figura acima mostra um circuito amplificador que fornece uma saída Vo , baseada na diferença entre duas entradas (V1 - V2). O valor da resistência do potenciômetro Rp , em função de R, para que se tenha Vo = 3(V1 -V2) , é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183127
Engenharia Eletrônica
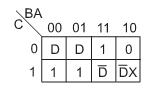
Desconsiderando-se os inversores, a menor soma de produtos que implementa o mapa acima possui