Questões de Concurso Para professor - controle e automação
Foram encontradas 36 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171377
Engenharia de Automação
Um manipulador antropomórfico com 6 juntas revolutas está sendo usado para mover peças em uma linha de
produção automotiva. É possível afirmar que o Espaço de Trabalho do manipulador tem dimensão:
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171376
Engenharia de Automação
Considere um robô móvel não-holonômico que se move sobre um plano horizontal sem obstáculos. É correto
dizer que o robô:
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171375
Engenharia de Automação
Considere as afirmativas abaixo:
I – Além de apresentar um torque elevado (quando comparado a outras situações), a partida direta do motor de indução trifásico é o método mais barato.
II – Por ter acesso às correntes de linha do motor, pelo circuito de força, o relé térmico exibe a vantagem de proteger o motor contra curto-circuito.
III - A redução da corrente para 1/3 é a vantagem da partida estrela-triângulo em comparação com a partida direta.
IV- Porque a redução da corrente é feita via transformador, a partida compensadora reduz a corrente de entrada sem reduzir o torque do motor.
V – A aceleração do motor com a partida via softstarter exibe muitos trancos e golpes mecânicos porque a forma de onda da tensão de alimentação não é senoidal.
Das afirmativas é correto apenas o que se afirma em:
I – Além de apresentar um torque elevado (quando comparado a outras situações), a partida direta do motor de indução trifásico é o método mais barato.
II – Por ter acesso às correntes de linha do motor, pelo circuito de força, o relé térmico exibe a vantagem de proteger o motor contra curto-circuito.
III - A redução da corrente para 1/3 é a vantagem da partida estrela-triângulo em comparação com a partida direta.
IV- Porque a redução da corrente é feita via transformador, a partida compensadora reduz a corrente de entrada sem reduzir o torque do motor.
V – A aceleração do motor com a partida via softstarter exibe muitos trancos e golpes mecânicos porque a forma de onda da tensão de alimentação não é senoidal.
Das afirmativas é correto apenas o que se afirma em:
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171374
Eletricidade
Na figura abaixo são dados um circuito de comando e comportamento de seu temporizador KT1
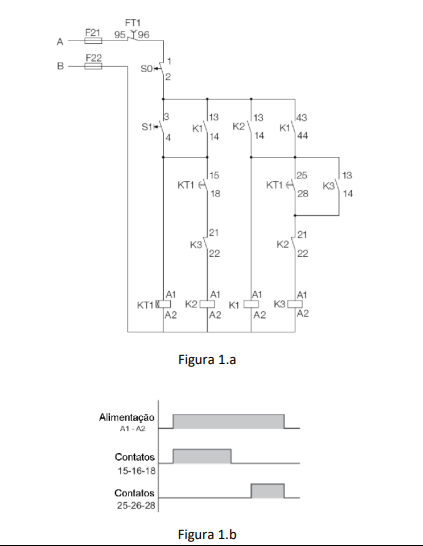
Analise as seguintes afirmativas.
I. O Contato 21-22 de K3 tem a função de intertravamento elétrico.
II. O Contato 13-14 de K1 tem a função de temporização.
III. A sequência de acionamento dos contatores será: K1-K2-K3.
IV. O Contato 13-14 de K1 tem a função de intertravamento mecânico.
V. A sequência de acionamento dos contatores será: K2-K1-K3.
VI. O Contato 21-22 de K3 tem a função de selo.
São corretas a(s) afirmativa(s):
Analise as seguintes afirmativas.
I. O Contato 21-22 de K3 tem a função de intertravamento elétrico.
II. O Contato 13-14 de K1 tem a função de temporização.
III. A sequência de acionamento dos contatores será: K1-K2-K3.
IV. O Contato 13-14 de K1 tem a função de intertravamento mecânico.
V. A sequência de acionamento dos contatores será: K2-K1-K3.
VI. O Contato 21-22 de K3 tem a função de selo.
São corretas a(s) afirmativa(s):
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171373
Engenharia Eletrônica
Dadas a implementação eletrônica de controladores e as possíveis respostas típicas dos elementos básicos de
controlador PID a entradas determinadas,
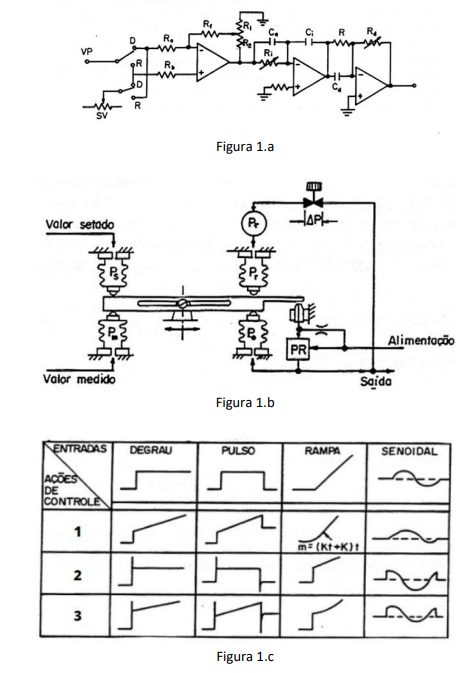
analise as seguintes afirmativas.
I. A implementação pneumática (Figura 1.b) é do controlador PID.
II. As implementações apresentadas (Figuras 1.a e 1.b) representam o mesmo controlador.
III. As respostas 3), 1) e 2) (Figura 1.c) são devidas às ações proporcional, proporcional-integral-derivativa e proporcional-integral.
IV. Nas respostas 1), 2) e 3) (Figura 1.c) não há ação derivativa.
V. A ação 2) (Figura 1.c) corresponde à ação proporcional-derivativa.
VI. A ação que corresponde à implementação pneumática (Figura 1.b) é ação 1) (Figura 1.c).
São corretas as afirmativas:
analise as seguintes afirmativas.
I. A implementação pneumática (Figura 1.b) é do controlador PID.
II. As implementações apresentadas (Figuras 1.a e 1.b) representam o mesmo controlador.
III. As respostas 3), 1) e 2) (Figura 1.c) são devidas às ações proporcional, proporcional-integral-derivativa e proporcional-integral.
IV. Nas respostas 1), 2) e 3) (Figura 1.c) não há ação derivativa.
V. A ação 2) (Figura 1.c) corresponde à ação proporcional-derivativa.
VI. A ação que corresponde à implementação pneumática (Figura 1.b) é ação 1) (Figura 1.c).
São corretas as afirmativas: