Questões de Concurso Público UFSC 2023 para Tecnólogo/Mecatrônica Industrial
Foram encontradas 4 questões
Q2166819
Mecatrônica
A figura abaixo mostra um conversor analógico-digital de rampa digital que monitora a tensão VB
de uma bateria de 12 V. A saída do conversor é um número binário de 4 bits, ABCD, que
corresponde à tensão da bateria em degraus de 1 V, sendo A o bit mais significativo (MSB). As
saídas binárias do conversor A/D são ligadas em um circuito lógico que produz uma saída Z. 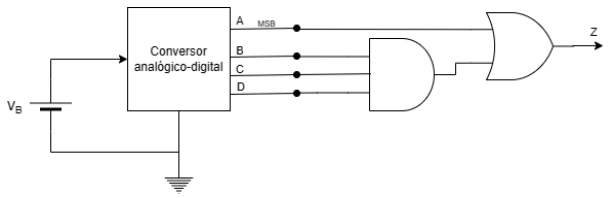
A saída Z é ativada em nível ALTO se e somente se a tensão da bateria VB for maior que:
A saída Z é ativada em nível ALTO se e somente se a tensão da bateria VB for maior que:
Q2166821
Mecatrônica
Considerando a organização de um sistema computacional básico, relacione os termos da coluna
1 às definições da coluna 2 e assinale a alternativa com a sequência correta de cima para baixo.
Coluna 1 I. ULA II. Unidade de controle III. Unidade de memória IV. Unidade de entrada V. Seção de registradores
Coluna 2 ( ) Conjunto de dispositivos usados para obter dados externos ao computador.
( ) Elemento de um microcomputador responsável por armazenar programas e dados que podem ou não ser alterados pelo microprocessador.
( ) Área de um microprocessador que realiza operações aritméticas e lógicas sobre os dados.
( ) Área de um microprocessador responsável por gerar os sinais apropriados para execução das instruções.
( ) Área de um microprocessador com grupos de flip-flops que realizam diversas funções de contagem e armazenamento temporário de dados, instruções e endereços de memória durante a execução de programas.
Coluna 1 I. ULA II. Unidade de controle III. Unidade de memória IV. Unidade de entrada V. Seção de registradores
Coluna 2 ( ) Conjunto de dispositivos usados para obter dados externos ao computador.
( ) Elemento de um microcomputador responsável por armazenar programas e dados que podem ou não ser alterados pelo microprocessador.
( ) Área de um microprocessador que realiza operações aritméticas e lógicas sobre os dados.
( ) Área de um microprocessador responsável por gerar os sinais apropriados para execução das instruções.
( ) Área de um microprocessador com grupos de flip-flops que realizam diversas funções de contagem e armazenamento temporário de dados, instruções e endereços de memória durante a execução de programas.
Q2166833
Mecatrônica
Entre os vários aspectos a serem considerados na especificação de um robô, é importante definir o
seu número de graus de liberdade. Com relação a esse assunto, é correto afirmar que:
Q2166834
Mecatrônica
A figura abaixo apresenta um robô definido no espaço plano com cadeia cinemática do tipo RRP,
sendo que R representa uma junta de revolução e P representa uma junta do tipo prismática.
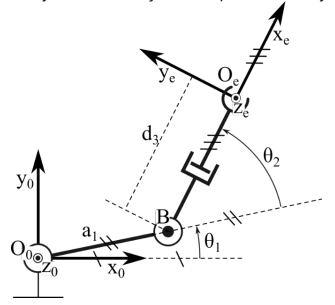
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo θ1, medido entre o eixo x0 e a reta definida pelos pontos O0 e B, sobre o elo a1. A segunda junta de revolução tem eixo de rotação paralelo ao eixo da primeira junta de revolução, ou seja, na direção e sentido de z0, mas passando pelo ponto B, com deslocamento de junta definido pelo ângulo θ2, medido entre a reta definida entre os pontos O0 e B (alongamento tracejado na figura) e a reta definida entre os pontos B e a origem Oe. A terceira junta prismática tem seu eixo na direção e sentido do eixo xe (eixo x do sistema de coordenadas do efetuador) definido pela relação
xe = Oe − B / ‖Oe − B‖
passando pelo ponto B, com deslocamento d3, correspondente à distância entre os pontos B e Oe. Com respeito ao robô RRP, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Não é possível gerar movimento de deslocamento para o efetuador do robô RRP na direção de z0. ( ) O robô RRP possui quatro graus de mobilidade. ( ) O volume de trabalho do robô RRP é cilíndrico. ( ) O robô RRP não possui singularidades.
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo θ1, medido entre o eixo x0 e a reta definida pelos pontos O0 e B, sobre o elo a1. A segunda junta de revolução tem eixo de rotação paralelo ao eixo da primeira junta de revolução, ou seja, na direção e sentido de z0, mas passando pelo ponto B, com deslocamento de junta definido pelo ângulo θ2, medido entre a reta definida entre os pontos O0 e B (alongamento tracejado na figura) e a reta definida entre os pontos B e a origem Oe. A terceira junta prismática tem seu eixo na direção e sentido do eixo xe (eixo x do sistema de coordenadas do efetuador) definido pela relação
xe = Oe − B / ‖Oe − B‖
passando pelo ponto B, com deslocamento d3, correspondente à distância entre os pontos B e Oe. Com respeito ao robô RRP, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Não é possível gerar movimento de deslocamento para o efetuador do robô RRP na direção de z0. ( ) O robô RRP possui quatro graus de mobilidade. ( ) O volume de trabalho do robô RRP é cilíndrico. ( ) O robô RRP não possui singularidades.