Questões de Concurso Público IF-CE 2026 para Professor EBTT - Automação, Sensores e Atuadores
Foram encontradas 19 questões
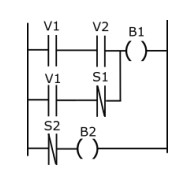
Com base nessas informações, assinale a alternativa que descreve a operação do sistema.
I. é recomendado utilizar o esquema de partida direta para a aplicação, pois fornece torque adequado para carga e exige reduzida corrente elétrica, particularmente durante o início da partida;
II. o motor com inversor de frequência é adequado para a aplicação proposta e apresenta controle dinâmico equivalente ao servomotor em qualquer condição de carga, sem requisitar a presença de nenhum sensor adicional para controle preciso de velocidade e bastando operação em malha aberta;
III. o servomotor com controle em malha fechada é a solução mais adequada, pois permite alto torque em baixas velocidades, controle preciso de posição e melhor resposta dinâmica.
Está(ão) correto(s) o(s) argumento(s)
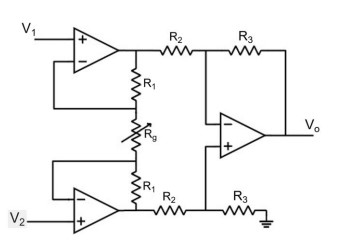
Com base nessas informações, é correto afirmar que
Um time de engenharia identificou uma falha na confecção de alguns módulos eletrônicos compostos por pontes de Wheatstone, utilizados para medir a variação de resistência de um sensor quando um galvanômetro presente em sua estrutura indica corrente nula, conforme figura a seguir.
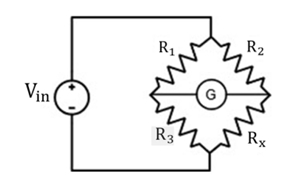
O circuito é alimentado por uma fonte de alimentação de Vin = 5 V, e, a princípio, todos os resistores – R1, R2, R3 e Rx da ponte de Wheatstone – deveriam apresentar a resistência de 1 kΩ., incluindo o resistor associado ao sensor, definido por Rx, que apresenta essa resistência nas condições requeridas para a medição de um processo em uma indústria. Contudo verificou-se que o real valor de Rx para a condição de medição referida apresenta uma resistência de 2 kΩ., enquanto os demais resistores apresentam 1 kΩ.. Para manter a operação do módulo nas circunstâncias descritas, o time técnico chegou à conclusão de que era mais vantajoso substituir o resistor R1 por outro, de diferente valor de resistência. Qual deve ser o novo valor de resistência de R1?
A figura a seguir apresenta elementos que são utilizados frequentemente em sistemas de automação industrial.
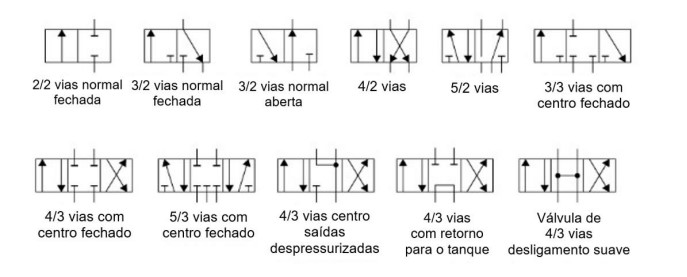
Acerca desses elementos, assinale a alternativa correta.
• encoder #1: fornece pulsos elétricos proporcionais ao deslocamento do eixo e necessita de procedimento de referência (homing) sempre que o sistema é energizado;
• encoder #2: fornece diretamente a posição angular codificada em cada instante, mantendo a informação de posição mesmo após desligamento do sistema.
Considerando a classificação dos dois encoders encontrados pelo engenheiro, quanto ao modo de determinação da posição, assinale a alternativa correta.
( ) Se um encoder possui um disco com 300 estrias, então a leitura de um pulso proveniente desse disco corresponde a um intervalo angular de 1º.
( ) Se f for calculado como 7,2 kHz e um encoder possui PPR = 360, então o valor absoluto da velocidade angular do disco é de 1200 RPM.
( ) Após sincronização, a quantidade de pulsos oriundos de um encoder contados por um CLP foi de 72. Se PPR = 720, o valor absoluto do intervalo angular estimado é de 60º.
( ) Nos encoders incrementais angulares ópticos, a defasagem de 90º entre os pulsos do encoder serve para identificar a posição angular absoluta.
( ) Ainda que a alimentação do encoder incremental seja interrompida, é possível identificar a informação de posição angular original após o restabelecimento da alimentação.