Questões de Concurso Público AMAZUL 2026 para Engenheiro Controle e Automação
Foram encontradas 23 questões
Q3852269
Engenharia de Automação
Seja o problema do regulador quadrático ótimo para um sistema
linear descrito pela equação de estados:
ẋ = Ax + Bu
em que x é o vetor de estados, u é o vetor de entradas e A e B são as matrizes do modelo em espaço de estados.
Neste problema de controle ótimo, minimiza-se o funcional
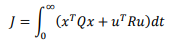
em que Q e R são matrizes de ponderação, a fim de obter a matriz de ganhos K da lei de controle por realimentação completa de estados u = −Kx.
A solução passa pela obtenção de uma matriz S, solução de uma equação de Riccati, extraída da formulação do problema.
Analise os itens a seguir relacionados à solução do problema de controle do regulador ótimo quadrático:
I. O ganho K é igual a R −1B TS. II. As matrizes Q, R e S devem ser positivas semidefinidas. III. O sistema em malha fechada é estável se o par (A,B) for controlável.
Está correto o que se afirma em
ẋ = Ax + Bu
em que x é o vetor de estados, u é o vetor de entradas e A e B são as matrizes do modelo em espaço de estados.
Neste problema de controle ótimo, minimiza-se o funcional
em que Q e R são matrizes de ponderação, a fim de obter a matriz de ganhos K da lei de controle por realimentação completa de estados u = −Kx.
A solução passa pela obtenção de uma matriz S, solução de uma equação de Riccati, extraída da formulação do problema.
Analise os itens a seguir relacionados à solução do problema de controle do regulador ótimo quadrático:
I. O ganho K é igual a R −1B TS. II. As matrizes Q, R e S devem ser positivas semidefinidas. III. O sistema em malha fechada é estável se o par (A,B) for controlável.
Está correto o que se afirma em
Q3852270
Engenharia de Automação
A respeito dos principais tipos de sensores empregados como
dispositivos de chaveamento em atuadores elétricos, analise as
afirmações a seguir:
I. Sensores indutivos detectam materiais metálicos, pois operam pela alteração do campo eletromagnético gerado pelo próprio sensor.
II. Sensores capacitivos podem detectar líquidos, pós e materiais orgânicos, devido à variação da constante dielétrica do meio.
III. Chaves magnéticas do tipo reed switch realizam a comutação sem contato mecânico direto entre partes móveis.
É correto o que se apresenta em:
I. Sensores indutivos detectam materiais metálicos, pois operam pela alteração do campo eletromagnético gerado pelo próprio sensor.
II. Sensores capacitivos podem detectar líquidos, pós e materiais orgânicos, devido à variação da constante dielétrica do meio.
III. Chaves magnéticas do tipo reed switch realizam a comutação sem contato mecânico direto entre partes móveis.
É correto o que se apresenta em:
Q3852271
Engenharia de Automação
Classifique as seguintes afirmações acerca de condicionamento de
sinais como verdadeiro (V) ou falso (F):
I. Buffers baseados em amplificadores operacionais são utilizados antes de conversores analógico-digitais (ADC) para impedir que a impedância de entrada do conversor provoque carregamento do sinal e distorça a leitura.
II. Filtros anti-aliasing devem possuir frequência de corte inferior à frequência de Nyquist, a fim de limitar componentes espectrais indesejados.
III. Para sinais de baixa amplitude, realizar a digitalização diretamente no ADC, sem amplificação prévia, reduz o erro de quantização.
É correto o que se apresenta em:
I. Buffers baseados em amplificadores operacionais são utilizados antes de conversores analógico-digitais (ADC) para impedir que a impedância de entrada do conversor provoque carregamento do sinal e distorça a leitura.
II. Filtros anti-aliasing devem possuir frequência de corte inferior à frequência de Nyquist, a fim de limitar componentes espectrais indesejados.
III. Para sinais de baixa amplitude, realizar a digitalização diretamente no ADC, sem amplificação prévia, reduz o erro de quantização.
É correto o que se apresenta em: