Questões de Concurso Público AMAZUL 2026 para Engenheiro Controle e Automação
Foram encontradas 23 questões
Q3852242
Engenharia de Automação
A respeito da pirâmide de automação, conforme definida pela
norma ISA 95, analise os itens a seguir:
I. A pirâmide de automação possui 5 níveis, sendo o mais baixo o nível de processo e o mais alto o nível de gerenciamento corporativo.
II. Uma Interface Homem Máquina (IHM) é um dispositivo do nível de gerenciamento de planta.
III. Um Controlador Lógico Programável (CLP) é um dispositivo do nível de controle de processo.
É correto o que se apresenta em
I. A pirâmide de automação possui 5 níveis, sendo o mais baixo o nível de processo e o mais alto o nível de gerenciamento corporativo.
II. Uma Interface Homem Máquina (IHM) é um dispositivo do nível de gerenciamento de planta.
III. Um Controlador Lógico Programável (CLP) é um dispositivo do nível de controle de processo.
É correto o que se apresenta em
Q3852243
Engenharia de Automação
Durante uma rotina de verificação, um técnico verificou que um
dado sensor PT-100 estava calibrado, uma vez que apresentava
uma resistência de 138,5 ohms quando submetido a uma
temperatura de referência de 100°C. Após reconectar o sensor no
processo, ele verificou que sua resistência caiu para
aproximadamente 119,3 ohms, a temperatura medida pelo PT-100
nesse instante é de, aproximadamente,
Q3852245
Engenharia de Automação
Considere um circuito amplificador não inversor utilizando um
amplificador ideal alimentado com uma fonte simétrica de 12V.
Utiliza-se um resistor R1 = 2k ohms ligando a porta inversora à
terra, e um resistor R2 = 20k ohms fazendo uma retroalimentação
com a porta inversora.
Supondo um sinal de entrada
Vi = 0,5 sen(120t), a tensão pico a pico da forma da saída Vo do amplificador é
Vi = 0,5 sen(120t), a tensão pico a pico da forma da saída Vo do amplificador é
Q3852246
Engenharia de Automação
Considere um amplificador operacional ideal, com alimentação
VCC+ = 12V e VCC- = 0V. Sua entrada não inversora é alimentada
com uma fonte Vref = 5V e aplica-se um sinal de entrada Vi =
10 sen(10t) na entrada inversora.
O duty-cyle do sinal de saída Vo é
O duty-cyle do sinal de saída Vo é
Q3852247
Engenharia de Automação
Em Instrumentação industrial, é muito comum a utilização de
transmissores, que são responsáveis por converter sinais de
elementos sensores em sinais padronizados a serem transmitidos
para outros elementos da malha de instrumentação.
Analise os itens a seguir a respeito de transmissores pneumáticos:
I. Não podem ser utilizados em áreas classificadas.
II. Possuem como sinal típico de saída 3 a 15psi.
III. Construtivamente podem ser do tipo equilíbrio de forças ou balanço de movimento.
É correto o que se apresenta em
Analise os itens a seguir a respeito de transmissores pneumáticos:
I. Não podem ser utilizados em áreas classificadas.
II. Possuem como sinal típico de saída 3 a 15psi.
III. Construtivamente podem ser do tipo equilíbrio de forças ou balanço de movimento.
É correto o que se apresenta em
Q3852249
Engenharia de Automação
Durante um projeto eletrônico um projetista encontrou a seguinte
expressão Boleana  Após aplicar alguns
passos, o projetista conseguiu simplficar a expressão boleana.
Após aplicar alguns
passos, o projetista conseguiu simplficar a expressão boleana.
A opção que melhor representa a expressão Boleana simplificada é
Após aplicar alguns
passos, o projetista conseguiu simplficar a expressão boleana. A opção que melhor representa a expressão Boleana simplificada é
Q3852252
Engenharia de Automação
Considere um circuito RC paralelo, em que uma fonte de
alimentação de 50V em série com uma chave SW1, alimenta um
resistor R de 10 ohms e um capacitor C de 100mF em paralelo.
Após um longo período com a chave SW1 fechada, a chave é
aberta.
O módulo da corrente que passa pelo resistor R no instante imediatamente após a abertura da chave e 6s após a abertura, respectivamente, são, aproximadamente
O módulo da corrente que passa pelo resistor R no instante imediatamente após a abertura da chave e 6s após a abertura, respectivamente, são, aproximadamente
Q3852253
Engenharia de Automação
Simulações Hardware In The Loop (HIL) são bastante utilizadas
atualmente para permitir um ciclo mais rápido de
desenvolvimento de produtos.
Analise os itens a seguir a respeito de Simulações Hardware in The Loop:
I. Necessitam de um Simulador de Tempo Real com capacidade de processamento compatível para que possam simular a planta em tempo real.
II. Não necessitam de uma modelagem matemática representativa da planta a ser simulada para que as simulações sejam efetivas.
III. São amplamente utilizados na indústria aeroespacial, automobilística e em eletrônica de potência.
É correto o que se afirma em
Analise os itens a seguir a respeito de Simulações Hardware in The Loop:
I. Necessitam de um Simulador de Tempo Real com capacidade de processamento compatível para que possam simular a planta em tempo real.
II. Não necessitam de uma modelagem matemática representativa da planta a ser simulada para que as simulações sejam efetivas.
III. São amplamente utilizados na indústria aeroespacial, automobilística e em eletrônica de potência.
É correto o que se afirma em
Q3852255
Engenharia de Automação
Considere um sistema de controle digital cuja função de
transferência do sistema em malha aberta é dada pela seguinte
expressão:
G(z) = z - 0,5 / z - 0,9
O erro em regime permanente desse sistema a uma entrada degrau é, aproximadamente
G(z) = z - 0,5 / z - 0,9
O erro em regime permanente desse sistema a uma entrada degrau é, aproximadamente
Q3852257
Engenharia de Automação
Considere a expansão em frações parciais da função de
transferência G(s) = (s+5)/(s2 + 7s + 12) em termos de primeira
ordem da forma A1/(s+p1) + A2/(s+p2) em que -p1 e -p2 são os polos
de G(s) e A1 e A2 são os respectivos coeficientes dos termos da
expansão.
O valor do coeficiente correspondente ao polo de maior valor absoluto é
O valor do coeficiente correspondente ao polo de maior valor absoluto é
Q3852258
Engenharia de Automação
Considere a planta G(s) = 1/(s3 + 6s2 + 5s) em série com um ganho
proporcional kp positivo numa malha de realimentação negativa
unitária.
O valor do ganho kp para o qual a resposta livre do correspondente sistema em malha fechada apresente um comportamento oscilatório de amplitude constante é
O valor do ganho kp para o qual a resposta livre do correspondente sistema em malha fechada apresente um comportamento oscilatório de amplitude constante é
Q3852259
Engenharia de Automação
Considere o traçado do lugar das raízes para o sistema com função
de transferência G(s) = 1/(s3 + 6s2 + 25s) em série com um ganho
real positivo numa malha de realimentação unitária negativa.
O ponto de encontro das assíntotas do lugar das raízes encontra-se em
O ponto de encontro das assíntotas do lugar das raízes encontra-se em
Q3852260
Engenharia de Automação
Seja um compensador de avanço de fase com função de
transferência D(s) = (s + z)/(s + p), em que z e p são reais positivos
e, correspondem, respectivamente, às frequências de quebra do
zero e do polo do compensador na sua resposta em frequência,
avaliada em radianos por segundo.
O valor máximo da fase da resposta em frequência deste compensador encontra-se na frequência correspondente ao(à)
O valor máximo da fase da resposta em frequência deste compensador encontra-se na frequência correspondente ao(à)
Q3852261
Engenharia de Automação
Considere um controlador proporcional integral com função de
transferência D(s) = kp + ki/s em série com uma planta com função
de transferência G(s) = (s+2)/(s2 + 3s + 4) numa malha de
realimentação unitária negativa.
O valor do ganho integral ki para que o erro em estado estacionário para uma entrada rampa unitária aplicada ao sistema em malha fechada correspondente seja de 0,1 unidades, é
O valor do ganho integral ki para que o erro em estado estacionário para uma entrada rampa unitária aplicada ao sistema em malha fechada correspondente seja de 0,1 unidades, é
Q3852262
Engenharia de Automação
Um sistema com equação de estados:
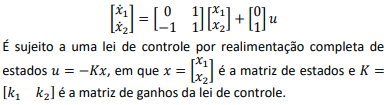
Os valores dos ganhos k1 e k2 para que o sistema em malha fechada tenha polos duplos em −2 são, respectivamente
Q3852263
Engenharia de Automação
Considere o seguinte sistema SISO representado na forma de espaço de estados:
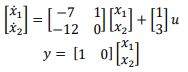
A representação deste mesmo sistema em função de transferência é
Q3852264
Engenharia de Automação
Um sensor de força utiliza-se de um potenciômetro linear atrelado
a uma mola. Deseja-se que a faixa de leitura deste sensor seja de
0 a F newtons, correspondendo a um deslocamento máximo do
conjunto de D centímetros, e que a sensibilidade seja S volts por
newtons. O potenciômetro movimenta-se linearmente solidário à
deformação da mola e sua resistência varia linearmente com seu
deslocamento e sua máxima excursão é de X centímetros, sendo
X > D.
A constante de mola, em newtons por centímetros, e a tensão de alimentação do potenciômetro, em volts, devem ser, respectivamente,
A constante de mola, em newtons por centímetros, e a tensão de alimentação do potenciômetro, em volts, devem ser, respectivamente,
Q3852265
Engenharia de Automação
Seja uma rede de Petri com os seguintes elementos:
• Conjunto de lugares: P = {p1,p2,p3,p4}
• Conjunto de transições: T = {a,b,c,d}
• Pré condições das transições:
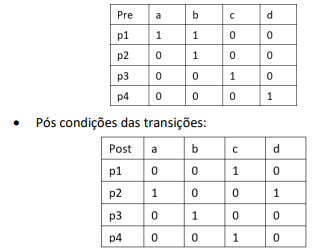
Considere que a rede está com uma marcação inicial p1 = 2, p2 = 0, p3 = 0 e p4 = 0, e disparam-se as transições a, b, c e d, em sequência e nesta ordem.
A marcação final da rede será
Q3852266
Engenharia de Automação
Um motor CC de imã permanente gera uma força contra
eletromotriz a uma razão de 0,5 V/100 rpm e possui uma
resistência de armadura igual a 15Ω. O motor incialmente parado
é alimentado com 12V.
A corrente de armadura quando a velocidade é 1500 rpm é, em ampères:
A corrente de armadura quando a velocidade é 1500 rpm é, em ampères:
Q3852268
Engenharia de Automação
Numa condição-transição de um dado GRAFCET encontra-se a
expressão “3s/a/7s” em que a é uma variável booleana.
Se a variável a for verdadeira por 12s seguidos e falsa, caso contrário, a duração total na qual a expressão “3s/a/7s” será verdadeira, em segundos, será
Se a variável a for verdadeira por 12s seguidos e falsa, caso contrário, a duração total na qual a expressão “3s/a/7s” será verdadeira, em segundos, será