Questões de Concurso Público INPE 2024 para Tecnologista Júnior I - Dinâmica Orbital e Controle de Atitude e Órbita
Foram encontradas 45 questões
Em uma simulação computacional, um engenheiro utilizou a seguinte equação do movimento para uma versão simplificada do sistema de suspensão de um veículo:

em que:
u = sinal temporal da entrada do sistema;
y = sinal temporal da saída do sistema;
b = coeficiente de atrito viscoso do amortecedor; e
k = constante da mola
Considere que o comando step (num, den) fornece o gráfico da resposta temporal ao degrau unitário de um sistema linear, cujos coeficientes dos polinômios do numerador e do denominador da sua função de transferência são, respectivamente, os vetores num e den. O engenheiro implementou o seguinte pseudocódigo para analisar o sistema de suspensão do veículo:
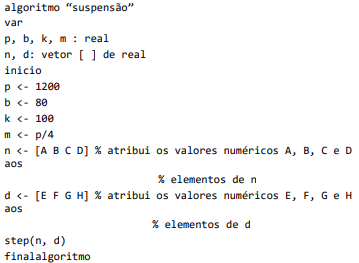
Assinale a opção que contém os valores numéricos dos vetores n e d, necessários à obtenção da resposta do sistema a uma entrada do tipo rampa unitária, utilizando o algoritmo acima.
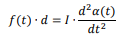
em que:
f(t) = força de controle (entrada do modelo)
d = distância entre o ponto de aplicação da força de controle e o centro de massa
I = momento de inércia
α(t) = ângulo de orientação do satélite (saída do modelo)
Foram atribuídos os seguintes valores para os parâmetros do sistema: d = 1,2 m e I = 4.000 kgm2 .
A equipe analisou o comportamento do satélite sujeito a diferentes sinais de entrada.
Assinale a opção que contém a resposta temporal do modelo a dois pulsos sequenciais, com as seguintes características: um pulso de 20 N, em t = 10s, com uma pequena duração de apenas 0,1s e um outro pulso em t = 20s, com mesma duração e intensidade, mas com magnitude negativa. Os pulsos podem ser considerados como excitações impulsivas.
A probabilidade de a distância entre o centro da circunferência e o termômetro mais próximo ser maior que r, sendo r < R, é igual a
Dado que choveu em um dia de visita do pesquisador, a probabilidade do pesquisador estar na cidade A é de, aproximadamente,
Considere as probabilidades conjuntas de X e Y dadas no quadro abaixo:
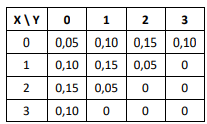
Determine a esperança condicional de X dado que Y = 1.
Suponha que X possa ser modelada através da seguinte função densidade de probabilidade:
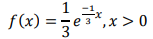
Determine a variância de X.
A probabilidade de que em um dia qualquer sejam lançados pelo menos 2 satélites é de
Considere os quaternions Q1 e Q2, dados por:
Q1 = 1 − i e Q2 = i − j + k .
Sabendo que o quaternion Q3 é dado por Q3 = Q1Q2, o módulo de Q3 é
Considere que um determinado sistema dinâmico possui uma realização em espaço de estados inicial, e que essa realização é “rotacionada” para uma nova realização através de uma matriz de transformação P.
Com relação à transformação de similaridade empregada na matriz de estado da realização inicial, analise as afirmativas a seguir.
I. Consiste na mudança das bases da matriz transformada.
II. Preserva autovalores da matriz transformada.
III. A matriz de transformação P deve ser unitária.
Está correto o que se afirma em
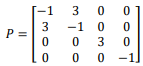
Um dos autovalores da matriz P é
Considere que um sistema dinâmico possui uma matriz de estado J , a qual é descrita a seguir:
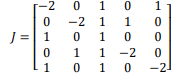
Sabe-se ainda que esta matriz possui um autovetor v , onde v = [0 −1 0 1 0].
Nessas condições, um dos autovalores da matriz J é
A resposta descrita pelos estados desse sistema depende de três aspectos: do sinal de entrada, da matriz de entrada e da matriz de transição de estados.
Considerando que s é a variável de Laplace, I é a matriz identidade e A é a matriz de estados, a matriz de transição de estados Φ(s) desse sistema é

A matriz de transição de estados Ø(t) desse sistema é:
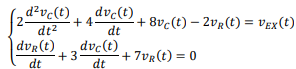
Sabendo que a fonte de tensão vEX(t) produz uma tensão constante de 10 V ao ser acionada, o equacionamento acima representado pode ser descrito por um sistema de equações diferenciais de 1ª ordem dado por:

Nessas condições, as matrizes A e B são, respectivamente,
Considere um sistema de controle que, após ser excitado por um sinal de banda estreita, produz um sinal de saída y(t) com a seguinte representação no domínio da frequência:

Os valores de y(t) para t = 0 e t → ∞ são, respectivamente,
I. A dinâmica do observador não é observável do ponto de vista de entrada e saída da planta.
II. A ordem do controlador é sempre superior à ordem da planta.
III. O ganho do regulador interfere na alocação de polos da planta.
Está correto o que se afirma em
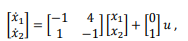
em que x1, x2 são estados e u a entrada. Após a inserção de um controlador por realimentação de estados de ganho K = [2 4] , o sistema em malha fechada passa a ter polos em

Sabendo que a > 5b, a resposta de P(s) ao degrau unitário

Nessas condições, a função de transferência em malha aberta desse sistema é