Questões de Concurso Público INPE 2024 para Tecnologista Júnior I - Dinâmica Orbital e Controle de Atitude e Órbita
Foram encontradas 30 questões
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Dinâmica Orbital e Controle de Atitude e Órbita |
Q2523710
Física
Os quaternions são uma espécie de extensão dos números
complexos para três dimensões, muito utilizados na física e
engenharias, como por exemplo no equacionamento da orientação
de robôs manipuladores.
Considere os quaternions Q1 e Q2, dados por:
Q1 = 1 − i e Q2 = i − j + k .
Sabendo que o quaternion Q3 é dado por Q3 = Q1Q2, o módulo de Q3 é
Considere os quaternions Q1 e Q2, dados por:
Q1 = 1 − i e Q2 = i − j + k .
Sabendo que o quaternion Q3 é dado por Q3 = Q1Q2, o módulo de Q3 é
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Dinâmica Orbital e Controle de Atitude e Órbita |
Q2523711
Física
Sistemas dinâmicos podem apresentar inúmeras realizações em
espaço de estado, onde todas apresentam mesma relação entradasaída. No entanto, algumas realizações contêm propriedades
peculiares, tais como a realização balanceada, largamente
empregada em algoritmos de redução de modelo como o
truncamento balanceado.
Considere que um determinado sistema dinâmico possui uma realização em espaço de estados inicial, e que essa realização é “rotacionada” para uma nova realização através de uma matriz de transformação P.
Com relação à transformação de similaridade empregada na matriz de estado da realização inicial, analise as afirmativas a seguir.
I. Consiste na mudança das bases da matriz transformada.
II. Preserva autovalores da matriz transformada.
III. A matriz de transformação P deve ser unitária.
Está correto o que se afirma em
Considere que um determinado sistema dinâmico possui uma realização em espaço de estados inicial, e que essa realização é “rotacionada” para uma nova realização através de uma matriz de transformação P.
Com relação à transformação de similaridade empregada na matriz de estado da realização inicial, analise as afirmativas a seguir.
I. Consiste na mudança das bases da matriz transformada.
II. Preserva autovalores da matriz transformada.
III. A matriz de transformação P deve ser unitária.
Está correto o que se afirma em
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Dinâmica Orbital e Controle de Atitude e Órbita |
Q2523713
Física
A representação de sistemas dinâmicos por modelo de espaço de
estados estabelece um significado físico-conceitual às características
matemáticas das matrizes de estado que compõem tal modelo.
Nesse diapasão, ressalta-se os autovalores e autovetores da matriz
de estados, os quais estão intimamente ligados a caracterização da
dinâmica desse sistema.
Considere que um sistema dinâmico possui uma matriz de estado J , a qual é descrita a seguir:
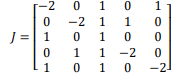
Sabe-se ainda que esta matriz possui um autovetor v , onde v = [0 −1 0 1 0].
Nessas condições, um dos autovalores da matriz J é
Considere que um sistema dinâmico possui uma matriz de estado J , a qual é descrita a seguir:
Sabe-se ainda que esta matriz possui um autovetor v , onde v = [0 −1 0 1 0].
Nessas condições, um dos autovalores da matriz J é
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Dinâmica Orbital e Controle de Atitude e Órbita |
Q2523718
Física
Um dos principais obstáculos na implementação de um controlador
por realimentação de estados é que raramente todos os estados de
uma planta real podem ser diretamente obtidos, onde muitas vezes
é até impossível o sensoriamento de alguns estados internos da
dinâmica em questão.
Uma maneira de contornar esse problema é fazer uso de um
observador de estado de ordem completa, cuja matriz de ganhos do
observador (comumente associada a letra L) tem a função de
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Dinâmica Orbital e Controle de Atitude e Órbita |
Q2523720
Física
Uma das grandes vantagens do controle por realimentação de
estados é a de garantir total controle da dinâmica do sistema,
permitindo alocar todos os polos do sistema em posições desejadas
pelo projetista, desde que o sistema em questão seja controlável.
Considere um sistema dinâmico em malha aberta dado pela seguinte
equação:
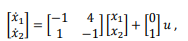
em que x1, x2 são estados e u a entrada. Após a inserção de um controlador por realimentação de estados de ganho K = [2 4] , o sistema em malha fechada passa a ter polos em
em que x1, x2 são estados e u a entrada. Após a inserção de um controlador por realimentação de estados de ganho K = [2 4] , o sistema em malha fechada passa a ter polos em
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Dinâmica Orbital e Controle de Atitude e Órbita |
Q2523722
Física
A realimentação unitária é uma das estruturas de controle mais
utilizadas para que um determinado sistema alcance o desempenho
desejado.
Considere um determinado sistema de controle, composto de um
controlador em série com uma planta, onde a saída da planta é Y(s)
e a entrada do controlador é a diferença entre a referência do
sistema R(s) e a saída da planta Y(s).
Sabe-se ainda que tal sistema possui a função de transferência em
malha fechada T(s), dada por

Nessas condições, a função de transferência em malha aberta desse sistema é
Nessas condições, a função de transferência em malha aberta desse sistema é
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Dinâmica Orbital e Controle de Atitude e Órbita |
Q2523723
Física
Antes de proporcionar o desempenho desejado a determinado
sistema dinâmico controlado, o controlador deve garantir que o
referido sistema seja estável em malha fechada.
Considere que determinado sistema de controle é representado pela
sua função de transferência de malha aberta M(s), dada por

Com relação a estabilidade deste sistema, analise as afirmativas a seguir.
I. É independente do valor do parâmetro k.
II. É independente do valor do parâmetro a.
III. É independente dos valores dos parâmetros b e c.
Está correto o que se afirma em
Com relação a estabilidade deste sistema, analise as afirmativas a seguir.
I. É independente do valor do parâmetro k.
II. É independente do valor do parâmetro a.
III. É independente dos valores dos parâmetros b e c.
Está correto o que se afirma em
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Dinâmica Orbital e Controle de Atitude e Órbita |
Q2523725
Física
Em testes de comissionamento de sistemas de controle em operação
é comum aplicar sinal do tipo degrau, uma vez que tal resposta
contém características do desempenho transitório do sistema.
Considere que determinado sistema de controle é representado pela
sua função de transferência de malha aberta N(s), dada por

Inicialmente, o valor do ganho do controlador K foi ajustado de forma a tornar o sistema em malha fechada criticamente amortecido. Caso o ganho K seja ligeiramente aumentado, é esperado que o sistema tenha
Inicialmente, o valor do ganho do controlador K foi ajustado de forma a tornar o sistema em malha fechada criticamente amortecido. Caso o ganho K seja ligeiramente aumentado, é esperado que o sistema tenha
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Dinâmica Orbital e Controle de Atitude e Órbita |
Q2523726
Física
A estrutura de controle do tipo PID é largamente utilizada na
indústria, por ser uma estratégia de controle de relativa simplicidade
e com capacidade de conferir ao sistema importantes requisitos de
desempenho.
Existem diversas técnicas para sintonia dos parâmetros desse tipo de
controlador, a qual deve ser escolhida de acordo com as
características do sistema como um todo.
Uma destas técnicas é o método
Uma destas técnicas é o método
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Dinâmica Orbital e Controle de Atitude e Órbita |
Q2523727
Física
Uma determinada indústria resolveu adicionar a sua planta um
processo que realiza o tratamento térmico de peças metálicas, para
que estas obtenham propriedades mecânicas desejadas. Esse
processo consiste na inserção de uma peça dentro de um forno
elétrico, cuja temperatura é controlada por um controlador do tipo
PI, de função de transferência dada por
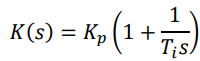
Após instalação do sistema, foi executado a função “autoajuste” presente no controlador PI, que estabeleceu um par de valores iniciais para as constantes Kp e Ti do respectivo controlador. Em seguida, o sistema passou por um teste de validação, que consistiu na execução de um degrau na referência, com intuito de verificar como o sistema seguia a temperatura pré-determinada. Ao analisar a resposta do sistema, verificou-se que a temperatura do forno possuía tempo de subida adequado, mas com tempo excessivo para eliminação de erro de estado estacionário. Neste caso, para melhorar a resposta transitória desse sistema, se faz necessário
Após instalação do sistema, foi executado a função “autoajuste” presente no controlador PI, que estabeleceu um par de valores iniciais para as constantes Kp e Ti do respectivo controlador. Em seguida, o sistema passou por um teste de validação, que consistiu na execução de um degrau na referência, com intuito de verificar como o sistema seguia a temperatura pré-determinada. Ao analisar a resposta do sistema, verificou-se que a temperatura do forno possuía tempo de subida adequado, mas com tempo excessivo para eliminação de erro de estado estacionário. Neste caso, para melhorar a resposta transitória desse sistema, se faz necessário