Questões de Concurso Público IBGE 2010 para Analista de Planejamento - Engenharia Elétrica
Foram encontradas 68 questões
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Engenharia Elétrica |
Q74512
Engenharia Elétrica
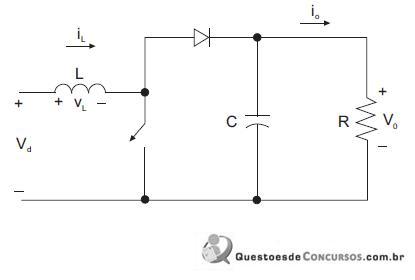
Considere o conversor CC - CC não isolado, considerado ideal, operando em modo contínuo, representado na figura acima. Admitindo que o ciclo de trabalho (duty cycle) D vale 0,5 e que a tensão de entrada
 é de 10V, a tensão
é de 10V, a tensão  de saída, em volts, é
de saída, em volts, é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Engenharia Elétrica |
Q74513
Engenharia Eletrônica
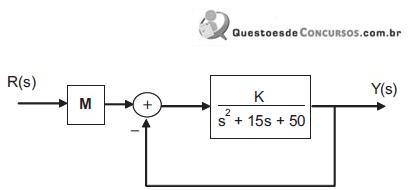
A figura acima apresenta o diagrama em blocos de um sistema de controle em malha fechada. Para que no domínio do tempo a saída y(t) siga a entrada de referência r(t), do tipo degrau, com erro de estado estacionário NULO, a expressão do ganho M será
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Engenharia Elétrica |
Q74514
Engenharia Eletrônica
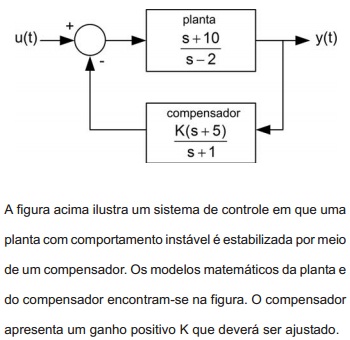
Aumentando-se o valor de K a partir de zero, o valor limite em que o sistema passará a ter um comportamento estável é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Engenharia Elétrica |
Q74515
Engenharia Eletrônica
Verifica-se que para um determinado valor de K, o sistema em malha fechada apresenta um polo localizado em s = -8 . Este valor é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Engenharia Elétrica |
Q74516
Engenharia Eletrônica
Deseja-se controlar o sistema linear, representado pelo modelo em espaço de estado, cujas equações são mostradas a seguir
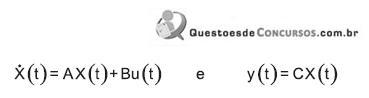
e o vetor de estado é
As matrizes são: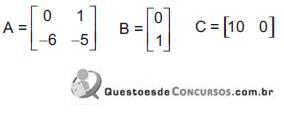
A estratégia de controle consiste em usar a seguinte realimentação: u(t) = - K X(t), onde K = [ k1 k2 ] e alocar os polos de malha fechada no plano S s1 em = - 5 +j5 e s2 = -5 - j5. O valor do vetor de ganhos K é
e o vetor de estado é
As matrizes são:
A estratégia de controle consiste em usar a seguinte realimentação: u(t) = - K X(t), onde K = [ k1 k2 ] e alocar os polos de malha fechada no plano S s1 em = - 5 +j5 e s2 = -5 - j5. O valor do vetor de ganhos K é