Questões de Concurso Sobre mecatrônica
Foram encontradas 108 questões
Analise o seguinte circuito.
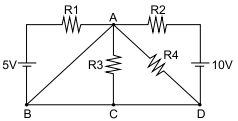
De acordo com as informações sobre o circuito, o valor
da queda de tensão no resistor R2, em volts (V), é:
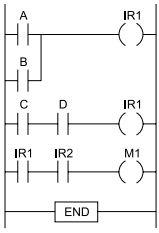
Considerando as informações apresentadas, a expressão lógica equivalente ao código Ladder é
A comunicação entre computadores e equipamentos pode ser realizada através de protocolos de redes de comunicação serial do tipo RS-232, também definido como EIA RS-232C. A comunicação serial nesse protocolo é estabelecida entre um DTE – Equipamento Terminal de Dados e um DCE – Equipamento de comunicação de Dados, através dos modos simplex, half-duplex e full-duplex.
Considerando os modos de transmissão do protocolo RS-232, o número mínimo de condutores necessários para o modo full-duplex é
Um robô industrial foi implantado em uma célula de manufatura com a função de inspecionar as dimensões de peças plásticas. A medição das dimensões das peças é realizada por meio de um sensor instalado no efetuador final do robô, sem que seja necessário o contato físico com a peça.
De acordo com essas informações, o dispositivo que foi instalado no efetuador final do robô é um sensor do tipo
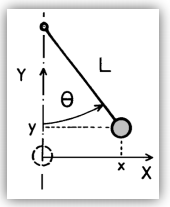
Para movimentar um manipulador robótico articulado para uma dada posição no espaço, é preciso encontrar uma sequência de deslocamentos angulares para suas articulações. Isso pode ser feito com a utilização da inversa da matriz jacobiana do manipulador, que representa as variações de posição do manipulador com relação aos ângulos das articulações. Considerando o manipulador ao lado, a matriz jacobiana desse manipulador está representada em
Em robótica, transformações homogêneas são usadas para representação de configurações, para mudar o sistema de referência e para deslocar um ponto ou sistema. Nesse contexto, considere as afirmações abaixo a respeito de transformações homogêneas.
I Satisfazem as propriedades associativa e comutativa.
II Podem ser representadas por uma matriz de transformação de dimensão 4x4.
III São compostas das operações de rotação e translação.
IV São compostas apenas de operações de translação.
Estão corretas as afirmações
I. Uma sobretensão é definida como uma tensão cujo valor de crista é maior do que o valor de crista correspondente à tensão máxima de um sistema ou equipamento elétrico. II. Um surto é uma onda transitória somente de tensão, caracterizada por elevada taxa de variação e que se propaga ao longo do sistema elétrico. III. Corrente de curto-circuito é a sobrecorrente que resulta de uma falta direta entre condutores vivos sob potenciais diferentes em funcionamento normal. IV. A capacidade de condução de corrente de um condutor é a corrente máxima que pode ser conduzida continuamente sem que sua temperatura em regime permanente ultrapasse um valor predeterminado. V. A corrente diferencial-residual de um circuito é a média ponderada dos valores instantâneos das correntes que percorrem todos os condutores vivos do circuito, em um dado ponto.
Estão CORRETAS as afirmações presentes nas alternativas
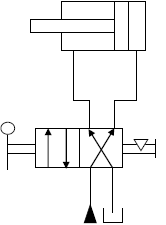
No circuito hidráulico, a seguir, sabe-se que o diâmetro do pistão é de 100 mm, o diâmetro da haste é de 25 mm, e o curso do pistão é de 200 mm. Além disso, a bomba fornece uma vazão de 0,3 litros por segundo. Dessa maneira, o tempo de avanço completo da haste do pistão e sua velocidade de avanço são respectivamente (adote π = 3)
I. A eletroerosão por penetração é mais utilizada que a fio devido ao uso intensivo de eletrodos de diamante. II. A eletroerosão a fio se torna mais atrativa quando há a necessidade de se usinar cavidades passantes em perfis complexos. III. Uma das limitações da eletroerosão é a geração de calor intenso e tensões altas na superfície da peça limitando seu uso para peças que não requeiram alta qualidade e alterações microestruturais. IV. Na operação por eletroerosão, a peça e o eletrodo são mergulhados em um fluido dielétrico, o mais utilizado é a água. V. No processo de eletroerosão, a erosão ocorre de forma simultânea na peça e no eletrodo.
Estão CORRETAS as afirmações presentes nas alternativas
Analise as afirmativas e assinale a CORRETA:
Determine a força normal, cortante e o momento fletor, respectivamente, da seção no ponto C para a configuração apresentada na figura com viga AB e roldanas acopladas, além de cabo e motor. W é um peso equivalente a 2.000 N, que o motor está levantando nesse instante.
Determine a força cortante e o momento fletor que agem na seção transversal da viga representada na figura abaixo, no ponto C.
A cinemática trata do estudo dos movimentos do robô sem considerar as causas que os originaram. No que tange a esse tema, julgue o item subsecutivo.
Sistemas robóticos usualmente utilizam matrizes homogêneas de dimensão 3x3.
Julgue o item a seguir, relativo ao princípio de robótica.
O robô de coordenadas cartesianas utiliza três juntas
rotacionais.
Julgue o item a seguir, relativo ao princípio de robótica.
O controle de trajetória ponto a ponto executa o ciclo, que
passa por pontos no espaço previamente definidos durante a
programação e os armazena na memória do controlador. Nesse
tipo de controle, a velocidade das juntas do robô é uniforme.