Questões de Concurso Sobre mecatrônica
Foram encontradas 108 questões
Ano: 2026
Banca:
FUNDATEC
Órgão:
CRT-RS
Prova:
FUNDATEC - 2026 - CRT-RS - Técnico Fiscal - Técnico em Mecatrônica |
Q4025752
Mecatrônica
Em um sistema automatizado, um cilindro pneumático é responsável por movimentar
uma peça em uma linha de produção. Observa-se que o movimento está irregular e com baixa força,
mesmo com a pressão da linha aparentemente correta. Qual é a causa mais provável?
Q3897705
Mecatrônica
Durante o processo de reballing de um componente BGA utilizando a estação de retrabalho Honton
R690, após a aplicação das novas esferas e o posicionamento do chip para soldagem na PCB, o
técnico deve garantir a correta fusão sem causar o desalinhamento do componente. Considerando os
recursos técnicos desta máquina, qual afirmação descreve o procedimento correto e o fenômeno físico
esperado?
Q3897704
Mecatrônica
Um técnico precisa manusear a estação de retrabalho Honton R690 para dois serviços distintos: o
primeiro é o reballing de um console antigo que utiliza solda Leaded (Sn63Pb37) e o segundo é um
notebook moderno com solda Lead-Free (SAC305). Considerando as zonas de aquecimento (Top,
Bottom e IR Plate), qual configuração de temperatura de Pico (Peak) e comportamento térmico é a
correta para cada um desses perfis?
Q3897702
Mecatrônica
No retrabalho de componentes SMD de alta densidade, a seleção do adaptador (bico) para a estação
de ar quente é tão crítica quanto a temperatura configurada. Ao realizar a remoção de um
componente QFP (Quad Flat Package) de 144 pinos rodeado por componentes passivos 0201
sensíveis, qual diretriz técnica deve ser seguida para garantir a eficiência térmica e a segurança da
placa?
Q3897696
Mecatrônica
No processo de parametrização de um forno de refusão, qual é a finalidade da zona de 'Soak'
(Encharque)?
Q3897695
Mecatrônica
No desenvolvimento de modelos tridimensionais para engenharia e design, a escolha entre o
paradigma de modelagem por malhas poligonais (Mesh Modeling) e o paradigma de modelagem
sólida paramétrica (B-Rep/NURBS) está associada aos requisitos de precisão geométrica e à
natureza da aplicação final. Sobre a distinção técnica entre esses dois fluxos de modelagem,
assinale a alternativa correta.
Q3897693
Mecatrônica
Na impressão 3D por FDM (Fused Deposition Modeling), a escolha do polímero termoplástico
influencia diretamente o processamento, as propriedades mecânicas e a resposta térmica da peça
final. Considerando as características típicas dos filamentos comerciais mais utilizados, assinale a
alternativa correta.
Q3897691
Mecatrônica
Para a fabricação de Circuitos Impressos (PCB), o layout desenvolvido no software ECAD
(Electronic Computer-Aided Design) deve ser exportado em um formato de arquivo vetorial que
atue como padrão universal de comunicação entre o projeto e a produção. Assinale a alternativa
que indica o formato padrão da indústria utilizado para descrever as imagens das camadas físicas
(cobre, máscara e serigrafia) da placa:
Q3897690
Mecatrônica
A análise de varredura em corrente alternada (AC Sweep), empregada em softwares EDA baseados
em SPICE, corresponde a uma análise de pequenos sinais, obtida pela linearização do circuito em
torno do ponto de operação em regime contínuo. Essa análise é utilizada principalmente para:
Q3897689
Mecatrônica
No processo de integração entre ambientes ECAD (Electronic Computer-Aided Design) e MCAD
(Mechanical Computer-Aided Design) para a verificação de interferências físicas e análises
dimensionais, a escolha do formato de exportação do modelo 3D da placa de circuito impresso (PCB)
é fundamental. Sobre as características dos formatos STEP e STL, assinale a alternativa correta.
Q3897688
Mecatrônica
No âmbito da manufatura aditiva, a categoria de processos denominada Fotopolimerização em
Cuba (Vat Photopolymerization), que engloba tecnologias como SLA (Stereolithography) e DLP
(Digital Light Processing), baseia-se na cura seletiva de polímeros líquidos. Considerando as
propriedades físicas e químicas típicas resultantes desse processo, essas tecnologias são
prioritariamente indicadas para aplicações que exijam:
Q3897687
Mecatrônica
A tecnologia de manufatura aditiva conhecida como FDM (Fused Deposition Modeling) pertence à
categoria de processos de extrusão de material (Material Extrusion), conforme a classificação
estabelecida pelas normas internacionais ISO/ASTM 52900. Essa tecnologia fundamenta-se em
qual princípio de funcionamento?
Ano: 2025
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2025 - IF-SP - Técnico em Laboratório/Área: Mecatrônica |
Q3781775
Mecatrônica
Durante uma atividade prática de furação em
laboratório, uma furadeira de bancada começou a
apresentar um ruído metálico contínuo, vibração,
aquecimento excessivo no eixo e uma variação
perceptível na rotação, dificultando o avanço da
broca no material e impossibilitando a atividade.
O técnico de laboratório verificou que o equipamento em questão estava sem uso há mais de seis
meses e sem histórico de manutenção preventiva.
Considerando esses sinais e o histórico do equipamento, assinale a alternativa que apresenta, respectivamente, um conjunto adequado de causa provável, ação de manutenção corretiva e ação de manutenção preventiva.
Considerando esses sinais e o histórico do equipamento, assinale a alternativa que apresenta, respectivamente, um conjunto adequado de causa provável, ação de manutenção corretiva e ação de manutenção preventiva.
Ano: 2025
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2025 - IF-SP - Técnico em Laboratório/Área: Mecatrônica |
Q3781774
Mecatrônica
Durante as primeiras décadas da automação
industrial, o mercado de Controladores Lógicos
Programáveis (CLPs) era altamente fragmentado.
Cada fabricante desenvolvia seu próprio software
e suas próprias linguagens de programação. Para
resolver esse problema e unificar o setor em busca
de padronizações, a Comissão Eletrotécnica Internacional (IEC) desenvolveu a norma IEC 61131.
Especificamente, a parte 3 desta norma, a IEC
61131-3, que estabeleceu o primeiro padrão global
para as linguagens de programação de CLPs.
Segundo a norma IEC 61131-3, são corretas as afirmativas:
I. A norma IEC 61131-3 padroniza cinco linguagens de programação para CLPs, dividindo-as em duas categorias: gráficas e textuais. Na categoria gráfica, são elas: Sequential Function Chart (SFC) e Ladder (LD)
II. Sequential Function Chart (SFC) é uma linguagem de programação textual para descrever processos sequenciais. Essa linguagem de programação deu origem à metodologia Grafcet.
III. SCADA é a versão brasileira da linguagem de programação gráfica Ladder (LD).
IV. Function Block Diagram (FBD) é a linguagem mais utilizada pelos programadores, pois permite a programação de CLPs utilizando a lógica de relés e contatores, similar a um diagrama elétrico.
Segundo a norma IEC 61131-3, são corretas as afirmativas:
I. A norma IEC 61131-3 padroniza cinco linguagens de programação para CLPs, dividindo-as em duas categorias: gráficas e textuais. Na categoria gráfica, são elas: Sequential Function Chart (SFC) e Ladder (LD)
II. Sequential Function Chart (SFC) é uma linguagem de programação textual para descrever processos sequenciais. Essa linguagem de programação deu origem à metodologia Grafcet.
III. SCADA é a versão brasileira da linguagem de programação gráfica Ladder (LD).
IV. Function Block Diagram (FBD) é a linguagem mais utilizada pelos programadores, pois permite a programação de CLPs utilizando a lógica de relés e contatores, similar a um diagrama elétrico.
Ano: 2025
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2025 - IF-SP - Técnico em Laboratório/Área: Mecatrônica |
Q3781771
Mecatrônica
Em desenho técnico, a representação geométrica correta não é o suficiente para garantir uma
fabricação da peça fidedigna à sua versão projetada. Além de representar a forma, também é necessário quantificá-la, em outras palavras, definir com
exatidão as dimensões e posições dos diferentes
elementos de forma da peça. A esta informação se
dá o nome de cotagem. No Brasil a norma que trata
da cotagem em desenho técnico é a NBR 10126.
Assinale a alternativa que representa, respectivamente, as palavras correspondentes a cada lacuna:
_______ são linhas a traço contínuo fino, normalmente perpendiculares à _________, que a ultrapassam ligeiramente e que têm origem no elemento a cotar.
________ são terminações de linha de cota e representam o início e o fim da dimensão representada por ela.
_________ são linhas retas ou arcos, a traço contínuo fino, paralelas ao contorno do elemento cuja dimensão define, normalmente delimitadas por setas.
_________ são números que indicam as dimensões lineares ou angulares do elemento. A unidade de medida em dimensões lineares é o milímetro, e para dimensões angulares é o ________.
Assinale a alternativa que representa, respectivamente, as palavras correspondentes a cada lacuna:
_______ são linhas a traço contínuo fino, normalmente perpendiculares à _________, que a ultrapassam ligeiramente e que têm origem no elemento a cotar.
________ são terminações de linha de cota e representam o início e o fim da dimensão representada por ela.
_________ são linhas retas ou arcos, a traço contínuo fino, paralelas ao contorno do elemento cuja dimensão define, normalmente delimitadas por setas.
_________ são números que indicam as dimensões lineares ou angulares do elemento. A unidade de medida em dimensões lineares é o milímetro, e para dimensões angulares é o ________.
Ano: 2025
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2025 - IF-SP - Técnico em Laboratório/Área: Mecatrônica |
Q3781770
Mecatrônica
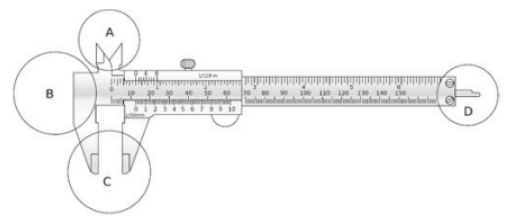
Durante o controle de qualidade em uma empresa metalúrgica, um técnico realiza a verificação dimensional de furos em buchas metálicas para rolamento fabricadas no dia. Utilizando um paquímetro analógico em aço inox de 150mm de resolução 1/50mm, ilustrado na figura abaixo, ele obtém as seguintes leituras do diâmetro interno em uma das peças: 19,92 mm, 19,98 mm, e 20,04 mm. O certificado de calibração
do instrumento indica um erro sistemático de – 0,01 mm.
Hennings. Paquímetro Universal: Detalhamento e Utilização. [S. l.]: Hennings, 2021. Disponível em: https://hennings.com.br/paquimetro-universaldetalhamento-e-utilizacao/. Acesso em: 10 out. 2025.
Com base nessas informações, analise as seguintes afirmativas:
I. A resolução do paquímetro é de dois centésimos de milímetro.
II. Para realizar as medições foram utilizados os bicos fixo e móvel identificados na região C da figura.
III. O valor médio corrigido com a incerteza total das medições é de 20,00 ± 0,01 mm.
IV. Considerando que a especificação do desenho técnico para fabricação mecânica desse furo fosse de Ø20,00 ± 0,10 mm, essa peça seria aprovada no controle de qualidade.
Estão corretas, apenas, as afirmativas em:
Hennings. Paquímetro Universal: Detalhamento e Utilização. [S. l.]: Hennings, 2021. Disponível em: https://hennings.com.br/paquimetro-universaldetalhamento-e-utilizacao/. Acesso em: 10 out. 2025.
Com base nessas informações, analise as seguintes afirmativas:
I. A resolução do paquímetro é de dois centésimos de milímetro.
II. Para realizar as medições foram utilizados os bicos fixo e móvel identificados na região C da figura.
III. O valor médio corrigido com a incerteza total das medições é de 20,00 ± 0,01 mm.
IV. Considerando que a especificação do desenho técnico para fabricação mecânica desse furo fosse de Ø20,00 ± 0,10 mm, essa peça seria aprovada no controle de qualidade.
Estão corretas, apenas, as afirmativas em:
Ano: 2025
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2025 - IF-SP - Técnico em Laboratório/Área: Mecatrônica |
Q3781769
Mecatrônica
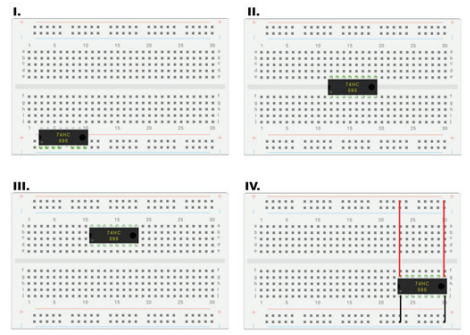
O Circuito Integrado 74HC595 é um registrador de deslocamento (shift register) de 8 bits, muito
comum em projetos que precisam expandir o número de saídas digitais. Em laboratório de eletrônica, um
aluno está desenvolvendo um projeto para controlar 8 LEDs de forma independente utilizando um microcontrolador. Para economizar pinos de saída do microcontrolador, o técnico de laboratório instruiu o aluno
a usar um Circuito Integrado 74HC595.
Fonte: IFSP, 2025.
Assinale a alternativa que representa, na figura, a maneira correta que o aluno deve posicionar este CI 74HC595 no protoboard para garantir que todos os 16 pinos fiquem eletricamente isolados uns dos outros e possam ser conectados ao restante do circuito:
Fonte: IFSP, 2025.
Assinale a alternativa que representa, na figura, a maneira correta que o aluno deve posicionar este CI 74HC595 no protoboard para garantir que todos os 16 pinos fiquem eletricamente isolados uns dos outros e possam ser conectados ao restante do circuito:
Ano: 2025
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2025 - IF-SP - Técnico em Laboratório/Área: Mecatrônica |
Q3781767
Mecatrônica
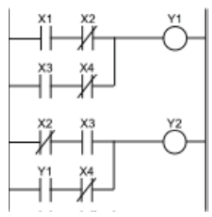
Em uma célula de envase, um CLP coordena
dois atuadores: Y1 (módulo de alimentação) e Y2
(módulo de descarte). As entradas X1, X2, X3 e
X4 são digitais. A figura abaixo representa o diagrama em linguagem Ladder, utilizado para definir
a energização de Y1 e Y2.
Com base no diagrama, em qual das condições a seguir, a saída Y2 estará energizada?
Fonte: IFSP, 2025.
Com base no diagrama, em qual das condições a seguir, a saída Y2 estará energizada?
Fonte: IFSP, 2025.
Ano: 2025
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2025 - IF-SP - Técnico em Laboratório/Área: Mecatrônica |
Q3781764
Mecatrônica
A integração de energia solar fotovoltaica e
energia eólica ao sistema elétrico apresenta desafios para o controle operacional de geração e transmissão de energia. Qual dos fatores abaixo mais
afeta a estabilidade da rede quando se utiliza grande quantidade de fontes renováveis intermitentes?
Ano: 2025
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2025 - IF-SP - Técnico em Laboratório/Área: Mecatrônica |
Q3781761
Mecatrônica
Um transformador é um dispositivo elétrico que altera os níveis de tensão de uma corrente alternada
(CA) sem mudar a frequência. Qual das alternativas abaixo descreve corretamente o princípio de funcionamento do transformador?