Questões de Concurso
Sobre eletrônica em mecatrônica em mecatrônica
Foram encontradas 13 questões
Q3897690
Mecatrônica
A análise de varredura em corrente alternada (AC Sweep), empregada em softwares EDA baseados
em SPICE, corresponde a uma análise de pequenos sinais, obtida pela linearização do circuito em
torno do ponto de operação em regime contínuo. Essa análise é utilizada principalmente para:
Ano: 2025
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2025 - IF-SP - Técnico em Laboratório/Área: Mecatrônica |
Q3781769
Mecatrônica
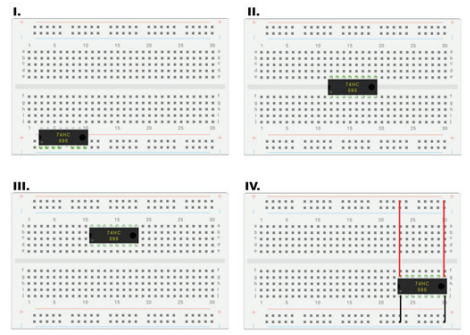
O Circuito Integrado 74HC595 é um registrador de deslocamento (shift register) de 8 bits, muito
comum em projetos que precisam expandir o número de saídas digitais. Em laboratório de eletrônica, um
aluno está desenvolvendo um projeto para controlar 8 LEDs de forma independente utilizando um microcontrolador. Para economizar pinos de saída do microcontrolador, o técnico de laboratório instruiu o aluno
a usar um Circuito Integrado 74HC595.
Fonte: IFSP, 2025.
Assinale a alternativa que representa, na figura, a maneira correta que o aluno deve posicionar este CI 74HC595 no protoboard para garantir que todos os 16 pinos fiquem eletricamente isolados uns dos outros e possam ser conectados ao restante do circuito:
Fonte: IFSP, 2025.
Assinale a alternativa que representa, na figura, a maneira correta que o aluno deve posicionar este CI 74HC595 no protoboard para garantir que todos os 16 pinos fiquem eletricamente isolados uns dos outros e possam ser conectados ao restante do circuito:
Q2166834
Mecatrônica
A figura abaixo apresenta um robô definido no espaço plano com cadeia cinemática do tipo RRP,
sendo que R representa uma junta de revolução e P representa uma junta do tipo prismática.
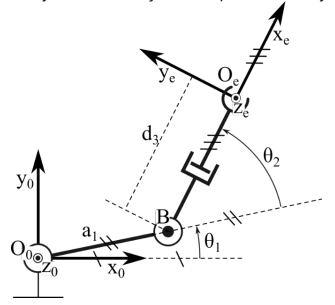
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo θ1, medido entre o eixo x0 e a reta definida pelos pontos O0 e B, sobre o elo a1. A segunda junta de revolução tem eixo de rotação paralelo ao eixo da primeira junta de revolução, ou seja, na direção e sentido de z0, mas passando pelo ponto B, com deslocamento de junta definido pelo ângulo θ2, medido entre a reta definida entre os pontos O0 e B (alongamento tracejado na figura) e a reta definida entre os pontos B e a origem Oe. A terceira junta prismática tem seu eixo na direção e sentido do eixo xe (eixo x do sistema de coordenadas do efetuador) definido pela relação
xe = Oe − B / ‖Oe − B‖
passando pelo ponto B, com deslocamento d3, correspondente à distância entre os pontos B e Oe. Com respeito ao robô RRP, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Não é possível gerar movimento de deslocamento para o efetuador do robô RRP na direção de z0. ( ) O robô RRP possui quatro graus de mobilidade. ( ) O volume de trabalho do robô RRP é cilíndrico. ( ) O robô RRP não possui singularidades.
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo θ1, medido entre o eixo x0 e a reta definida pelos pontos O0 e B, sobre o elo a1. A segunda junta de revolução tem eixo de rotação paralelo ao eixo da primeira junta de revolução, ou seja, na direção e sentido de z0, mas passando pelo ponto B, com deslocamento de junta definido pelo ângulo θ2, medido entre a reta definida entre os pontos O0 e B (alongamento tracejado na figura) e a reta definida entre os pontos B e a origem Oe. A terceira junta prismática tem seu eixo na direção e sentido do eixo xe (eixo x do sistema de coordenadas do efetuador) definido pela relação
xe = Oe − B / ‖Oe − B‖
passando pelo ponto B, com deslocamento d3, correspondente à distância entre os pontos B e Oe. Com respeito ao robô RRP, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Não é possível gerar movimento de deslocamento para o efetuador do robô RRP na direção de z0. ( ) O robô RRP possui quatro graus de mobilidade. ( ) O volume de trabalho do robô RRP é cilíndrico. ( ) O robô RRP não possui singularidades.
Q2166833
Mecatrônica
Entre os vários aspectos a serem considerados na especificação de um robô, é importante definir o
seu número de graus de liberdade. Com relação a esse assunto, é correto afirmar que:
Q2166821
Mecatrônica
Considerando a organização de um sistema computacional básico, relacione os termos da coluna
1 às definições da coluna 2 e assinale a alternativa com a sequência correta de cima para baixo.
Coluna 1 I. ULA II. Unidade de controle III. Unidade de memória IV. Unidade de entrada V. Seção de registradores
Coluna 2 ( ) Conjunto de dispositivos usados para obter dados externos ao computador.
( ) Elemento de um microcomputador responsável por armazenar programas e dados que podem ou não ser alterados pelo microprocessador.
( ) Área de um microprocessador que realiza operações aritméticas e lógicas sobre os dados.
( ) Área de um microprocessador responsável por gerar os sinais apropriados para execução das instruções.
( ) Área de um microprocessador com grupos de flip-flops que realizam diversas funções de contagem e armazenamento temporário de dados, instruções e endereços de memória durante a execução de programas.
Coluna 1 I. ULA II. Unidade de controle III. Unidade de memória IV. Unidade de entrada V. Seção de registradores
Coluna 2 ( ) Conjunto de dispositivos usados para obter dados externos ao computador.
( ) Elemento de um microcomputador responsável por armazenar programas e dados que podem ou não ser alterados pelo microprocessador.
( ) Área de um microprocessador que realiza operações aritméticas e lógicas sobre os dados.
( ) Área de um microprocessador responsável por gerar os sinais apropriados para execução das instruções.
( ) Área de um microprocessador com grupos de flip-flops que realizam diversas funções de contagem e armazenamento temporário de dados, instruções e endereços de memória durante a execução de programas.
Q2166819
Mecatrônica
A figura abaixo mostra um conversor analógico-digital de rampa digital que monitora a tensão VB
de uma bateria de 12 V. A saída do conversor é um número binário de 4 bits, ABCD, que
corresponde à tensão da bateria em degraus de 1 V, sendo A o bit mais significativo (MSB). As
saídas binárias do conversor A/D são ligadas em um circuito lógico que produz uma saída Z. 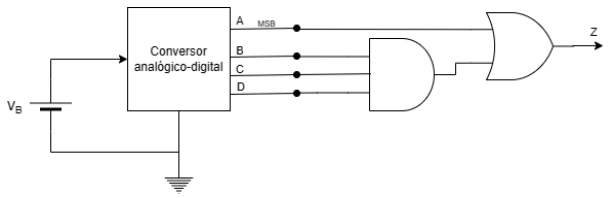
A saída Z é ativada em nível ALTO se e somente se a tensão da bateria VB for maior que:
A saída Z é ativada em nível ALTO se e somente se a tensão da bateria VB for maior que:
Ano: 2021
Banca:
FGV
Órgão:
IMBEL
Prova:
FGV - 2021 - IMBEL - Engenheiro Mecatrônico - Reaplicação |
Q1847214
Mecatrônica
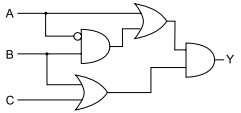
No circuito combinacional a seguir,

onde A, B e F são variáveis booleanas, a expressão correta e simplificada para F é
Ano: 2021
Banca:
FGV
Órgão:
IMBEL
Prova:
FGV - 2021 - IMBEL - Engenheiro Mecatrônico - Reaplicação |
Q1847213
Mecatrônica
Para uma arquitetura de computadores do tipo MIPS (milhões de
instruções por segundo), comumente usada nos desktops e
laptops, avalie as afirmativas a seguir.
I. A Unidade de Controle (UC) é utilizada para o sequenciamento das instruções da máquina, gerando os sinais de controle necessários para cada etapa do ciclo de instrução. II. A UC está localizada no chipset de controle de barramento da placa mãe. III. O circuito lógico digital, normalmente utilizado para sua implementação, é o decodificador, que recebe o campo OP ou OpCode da instrução e os codifica em sinais de controle para os outros dispositivos.
Está correto o que se afirma em
I. A Unidade de Controle (UC) é utilizada para o sequenciamento das instruções da máquina, gerando os sinais de controle necessários para cada etapa do ciclo de instrução. II. A UC está localizada no chipset de controle de barramento da placa mãe. III. O circuito lógico digital, normalmente utilizado para sua implementação, é o decodificador, que recebe o campo OP ou OpCode da instrução e os codifica em sinais de controle para os outros dispositivos.
Está correto o que se afirma em
Ano: 2021
Banca:
FGV
Órgão:
IMBEL
Prova:
FGV - 2021 - IMBEL - Engenheiro Mecatrônico - Reaplicação |
Q1847201
Mecatrônica
O circuito da figura é um Schmitt Trigger em que o amplificador
operacional é ideal, com tensões de saturação 0 e 15 Volts.
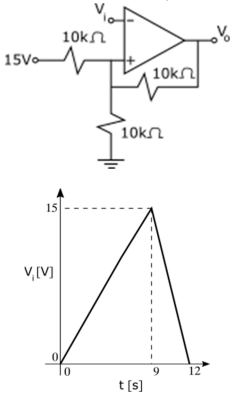
Considerando-se que de 0 a 12 segundos o sinal Vi apresenta a variação indicada na figura e que Vo = 15V em t = 0s, o tempo total, em segundos em que Vo permanece em 0V no intervalo de 0 a 12 segundos é
Considerando-se que de 0 a 12 segundos o sinal Vi apresenta a variação indicada na figura e que Vo = 15V em t = 0s, o tempo total, em segundos em que Vo permanece em 0V no intervalo de 0 a 12 segundos é
Ano: 2019
Banca:
VUNESP
Órgão:
UFABC
Prova:
VUNESP - 2019 - UFABC - Técnico de Laboratório - Mecatrônica |
Q1058895
Mecatrônica
Analise o seguinte diagrama elétrico.
A expressão booleana simplificada que representa corretamente o diagrama elétrico é:
Ano: 2019
Banca:
VUNESP
Órgão:
UFABC
Prova:
VUNESP - 2019 - UFABC - Técnico de Laboratório - Mecatrônica |
Q1058888
Mecatrônica
Analise o sinal plotado em uma tela de osciloscópio com o valor da escala horizontal igual a 250 ms/divisão e vertical igual a 300 ms/divisão, conforme imagem a seguir.
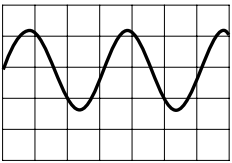
O valor da frequência do sinal, em hertz (Hz), é:
Ano: 2019
Banca:
VUNESP
Órgão:
UFABC
Prova:
VUNESP - 2019 - UFABC - Técnico de Laboratório - Mecatrônica |
Q1058883
Mecatrônica
O controle de um processo industrial é realizado por
um controlador lógico programável – CLP, conectado a
quatro dispositivos de comando do tipo botoeira sem retenção (A,B,C e D) e um motor elétrico (M1). A programação do CLP é baseada no acionamento do motor M1,
através de uma lógica de combinação entre as quatro
botoeiras, de acordo com o seguinte código Ladder:
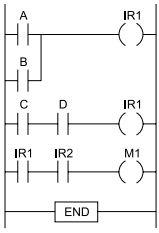
Considerando as informações apresentadas, a expressão lógica equivalente ao código Ladder é
Considerando as informações apresentadas, a expressão lógica equivalente ao código Ladder é
Ano: 2017
Banca:
IF-PE
Órgão:
IF-PE
Prova:
IF-PE - 2017 - IF-PE - Técnico de laboratório – Mecatrônica |
Q773894
Mecatrônica
Sobre sistemas automáticos de manobra para proteção de equipamentos e operadores, é correto
afirmar que:
I. Uma sobretensão é definida como uma tensão cujo valor de crista é maior do que o valor de crista correspondente à tensão máxima de um sistema ou equipamento elétrico. II. Um surto é uma onda transitória somente de tensão, caracterizada por elevada taxa de variação e que se propaga ao longo do sistema elétrico. III. Corrente de curto-circuito é a sobrecorrente que resulta de uma falta direta entre condutores vivos sob potenciais diferentes em funcionamento normal. IV. A capacidade de condução de corrente de um condutor é a corrente máxima que pode ser conduzida continuamente sem que sua temperatura em regime permanente ultrapasse um valor predeterminado. V. A corrente diferencial-residual de um circuito é a média ponderada dos valores instantâneos das correntes que percorrem todos os condutores vivos do circuito, em um dado ponto.
Estão CORRETAS as afirmações presentes nas alternativas
I. Uma sobretensão é definida como uma tensão cujo valor de crista é maior do que o valor de crista correspondente à tensão máxima de um sistema ou equipamento elétrico. II. Um surto é uma onda transitória somente de tensão, caracterizada por elevada taxa de variação e que se propaga ao longo do sistema elétrico. III. Corrente de curto-circuito é a sobrecorrente que resulta de uma falta direta entre condutores vivos sob potenciais diferentes em funcionamento normal. IV. A capacidade de condução de corrente de um condutor é a corrente máxima que pode ser conduzida continuamente sem que sua temperatura em regime permanente ultrapasse um valor predeterminado. V. A corrente diferencial-residual de um circuito é a média ponderada dos valores instantâneos das correntes que percorrem todos os condutores vivos do circuito, em um dado ponto.
Estão CORRETAS as afirmações presentes nas alternativas