Questões de Concurso
Sobre elétrica em mecatrônica em mecatrônica
Foram encontradas 27 questões
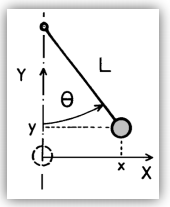
Para movimentar um manipulador robótico articulado para uma dada posição no espaço, é preciso encontrar uma sequência de deslocamentos angulares para suas articulações. Isso pode ser feito com a utilização da inversa da matriz jacobiana do manipulador, que representa as variações de posição do manipulador com relação aos ângulos das articulações. Considerando o manipulador ao lado, a matriz jacobiana desse manipulador está representada em
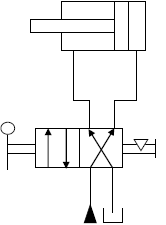
No circuito hidráulico, a seguir, sabe-se que o diâmetro do pistão é de 100 mm, o diâmetro da haste é de 25 mm, e o curso do pistão é de 200 mm. Além disso, a bomba fornece uma vazão de 0,3 litros por segundo. Dessa maneira, o tempo de avanço completo da haste do pistão e sua velocidade de avanço são respectivamente (adote π = 3)
A parte fixa, onde, normalmente, existem campos magnéticos fixos gerados por ímãs permanentes, é o(a)