Questões de Concurso
Sobre automação e controle em mecatrônica
Foram encontradas 34 questões
Procedimento busca (V,N,x) A ← 1 Z ← N Enquanto x não for encontrado se Z < A então retorna x não existe em V. m ← A + (Z - A) / 2 se V[m] < x então A ← m + 1 se V[m] > x então Z ← m - 1 se V[m] = x então retorna x encontrado fim Enquanto fim Procedimento
Assinale a opção que representa a complexidade do algoritmo utilizando a notação Big O.
O sistema descrito pelas seguintes equações de estado
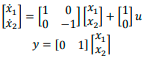
é
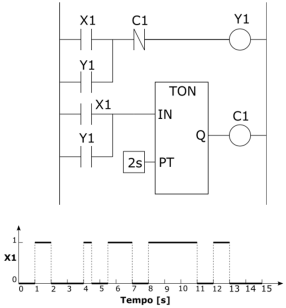
Desprezando-se o tempo de varredura do CLP, o tempo, em segundos, em que Y1 permanece em nível lógico 1 no intervalo de 0 a 15s é
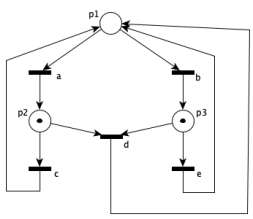
A transição que possui a propriedade de ser não viva é a transição
A respeito de relés e contatores considere:
“Os relés têm funções auxiliares como os contatores auxiliares, mas são e têm configuração de contato diferente do contator, possuindo um ponto comum associado a um contato normalmente aberto e outro fechado. Além disso, os relés têm um tempo de manobra que os contatores, isto é, são_” (NASCIMENTO, 2013)
Assinale a alternativa que preencha correta e respectivamente as lacunas:
A comunicação entre computadores e equipamentos pode ser realizada através de protocolos de redes de comunicação serial do tipo RS-232, também definido como EIA RS-232C. A comunicação serial nesse protocolo é estabelecida entre um DTE – Equipamento Terminal de Dados e um DCE – Equipamento de comunicação de Dados, através dos modos simplex, half-duplex e full-duplex.
Considerando os modos de transmissão do protocolo RS-232, o número mínimo de condutores necessários para o modo full-duplex é
Um robô industrial foi implantado em uma célula de manufatura com a função de inspecionar as dimensões de peças plásticas. A medição das dimensões das peças é realizada por meio de um sensor instalado no efetuador final do robô, sem que seja necessário o contato físico com a peça.
De acordo com essas informações, o dispositivo que foi instalado no efetuador final do robô é um sensor do tipo
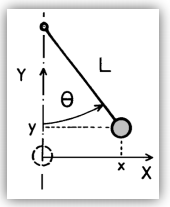
Para movimentar um manipulador robótico articulado para uma dada posição no espaço, é preciso encontrar uma sequência de deslocamentos angulares para suas articulações. Isso pode ser feito com a utilização da inversa da matriz jacobiana do manipulador, que representa as variações de posição do manipulador com relação aos ângulos das articulações. Considerando o manipulador ao lado, a matriz jacobiana desse manipulador está representada em
Em robótica, transformações homogêneas são usadas para representação de configurações, para mudar o sistema de referência e para deslocar um ponto ou sistema. Nesse contexto, considere as afirmações abaixo a respeito de transformações homogêneas.
I Satisfazem as propriedades associativa e comutativa.
II Podem ser representadas por uma matriz de transformação de dimensão 4x4.
III São compostas das operações de rotação e translação.
IV São compostas apenas de operações de translação.
Estão corretas as afirmações
Julgue o item a seguir, relativo ao princípio de robótica.
Diferentemente dos geradores, que produzem energia cinética,
os atuadores emissores consomem energia elétrica para a
emissão de sinais visuais, sonoros, calóricos e magnéticos.