Questões de Concurso
Sobre automação e controle em mecatrônica
Foram encontradas 34 questões
Segundo a norma IEC 61131-3, são corretas as afirmativas:
I. A norma IEC 61131-3 padroniza cinco linguagens de programação para CLPs, dividindo-as em duas categorias: gráficas e textuais. Na categoria gráfica, são elas: Sequential Function Chart (SFC) e Ladder (LD)
II. Sequential Function Chart (SFC) é uma linguagem de programação textual para descrever processos sequenciais. Essa linguagem de programação deu origem à metodologia Grafcet.
III. SCADA é a versão brasileira da linguagem de programação gráfica Ladder (LD).
IV. Function Block Diagram (FBD) é a linguagem mais utilizada pelos programadores, pois permite a programação de CLPs utilizando a lógica de relés e contatores, similar a um diagrama elétrico.
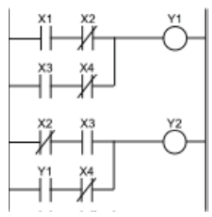
Com base no diagrama, em qual das condições a seguir, a saída Y2 estará energizada?
Fonte: IFSP, 2025.
Considerando sua aplicação em circuitos de comando elétrico, assinale a alternativa correta:
Julgue o item subsequente, a respeito de instrumentação industrial e de conceitos sobre sistemas de supervisão.
Aferição de instrumento é uma operação que estabelece, sob
condições especificadas, uma relação entre os valores e as
incertezas de medição fornecidas por padrões e as indicações
correspondentes com as incertezas associadas.
Julgue o item subsequente, a respeito de instrumentação industrial e de conceitos sobre sistemas de supervisão.
O transdutor de medição, assim como o termopar, o eletrodo
de pH e o tubo de Bourdon, é um dispositivo que fornece
uma grandeza de saída, a qual tem uma relação especificada
com uma grandeza de entrada.
Julgue o item subsequente, a respeito de instrumentação industrial e de conceitos sobre sistemas de supervisão.
Transmissores são dispositivos que comutam grandezas
físicas em sinais elétricos mensuráveis sobre o estado do
processo e enviam os valores processados e interpretados
para sistemas de controle ou monitoramento.
Julgue o item subsequente, a respeito de instrumentação industrial e de conceitos sobre sistemas de supervisão.
O manômetro de tubo de pitot consiste em um tubo em
forma de U, feito de vidro ou plástico transparente e
preenchido com um fluido (geralmente mercúrio ou água),
utilizado para medir a pressão por diferença de velocidade
relativa, por meio da equação de Torricelli.
Julgue o item subsequente, a respeito de instrumentação industrial e de conceitos sobre sistemas de supervisão.
A telemetria pode ser integrada a um sistema SCADA
(supervisory control and data acquisition), o que permite a
manutenção preditiva com comunicação bidirecional,
monitoramento remoto, dados em tempo real e alarmes e
notificações que possibilitam a rápida tomada de medidas
corretivas.
Julgue o item subsequente, a respeito de instrumentação industrial e de conceitos sobre sistemas de supervisão.
Válvulas de segurança são usadas em situações em que
pequenas flutuações de pressão são aceitáveis e desejáveis,
como em sistemas de HVAC, enquanto as de alívio são
indicadas para os casos em que a subida súbita e significativa
de pressão possa representar riscos graves em tanques de
armazenamento, caldeiras e gasodutos.
I. Os módulos são específicos para cada tipo de sensor que for usado, não podendo medir temperatura com o modulo analógico utilizado para medir fluxo.
II. Com o módulo analógico, é possível capturar, processar e controlar sinais analógicos.
III. Com um modulo analógico, pode-se comunicar dispositivos como computadores.
IV. As variáveis analógicas caracterizam a representação contínua de uma grandeza física.
Quais estão corretas?
( ) O CAPP tem por base três formas de planejamento do trabalho: variante, automático e generativo.
( ) O CAPP tem as seguintes etapas básicas: sequenciamento de operações; determinação do maquinário e ferramentas aplicáveis; lubrificação de peças; definição das condições de processo e respectivos tempos de fabricação.
( ) O CAM pode ser classificado em duas grandes categorias, de acordo com o sistema computacional: sistemas computadorizados de controle e monitoração e sistemas de suporte da produção.
( ) Sistemas como MRP e programação CNC são exemplos de CAM.
( ) Na forma variante de CAPP, as peças são classificadas de acordo com semelhanças de caráter geométrico ou de utilidade.
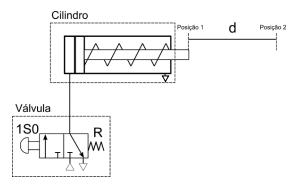
Com relação a esse circuito pneumático, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) A válvula é direcional do tipo 3/2. ( ) A válvula tem acionamento mecânico e retorno por mola. ( ) A válvula é normalmente fechada de controle por solenoide. ( ) O cilindro tem retorno por mola. ( ) Quando o acionamento 1S0 for ativado, o pistão do cilindro avança linearmente até a posição 2 e retorna automaticamente até a posição 1, repetindo esse ciclo até que 1S0 seja desativado.
I. As redes ASi são um exemplo típico de Sensorbus voltadas à comunicação de sensores e atuadores discretos.
II. As Devicebus são especificadas para comunicação de controladores lógicos programáveis e outros dispositivos de automação industrial cujas mensagens são predominantemente organizadas em bytes.
III. As altas taxas de transmissão de dados das redes Fieldbus garantem que os sinais digitais sejam transmitidos em tempo real entre os sensores e atuadores distribuídos nas malhas de controle do processo industrial.
IV. As barreiras de segurança intrínseca das redes Fieldbus permitem que estratégias de controle e de segurança sejam executas localmente nos atuadores instalados em áreas classificadas, sujeitas a risco de incêndio e explosão.
( ) A norma IEC 61131-3 especifica estas cinco linguagens para programação de CLP: Assembly, C, Diagrama de Contatos (Ladder Diagram), Diagrama de Blocos (Function Block Diagram) e Diagrama Sequencial (Sequencial Flow Chart).
( ) Em operação normal (modo RUN), o CLP realiza periodicamente o ciclo de varredura que basicamente grava as informações das portas de entradas nas respectivas memórias-imagem, processa a lógica programada e só então atualiza as portas de saída de acordo com o estado das respectivas memórias-imagem.
( ) Em razão da confiabilidade operacional, do alto desempenho de seus processadores, da alta capacidade de memória e do baixo custo, os CLPs industriais são os dispositivos mais indicados para o processamento de imagens em equipamentos de controle de qualidade da produção.
( ) Segundo a norma IEC 61131-3, a programação de CLPs em Diagrama de Contatos (Ladder Diagram) segue a mesma lógica de um circuito elétrico de relés, de modo que uma mudança na ordem em que os degraus (rungs) são programados no diagrama não pode alterar o comportamento gerado pelo CLP.
( ) As saídas a relé podem atuar em uma ampla faixa de tensão e corrente, o que reduz a necessidade de circuitos auxiliares.
( ) As saídas a transistor são especificadas para comutar tanto circuitos em corrente contínua quanto em corrente alternada.
( ) Por serem baseadas em elementos estáticos, as saídas a transistor possuem maior velocidade de comutação que as saídas a relé.
( ) Por serem baseadas em elementos eletromecânicos, as saídas a tiristor possuem menor vida útil que as saídas a relé.
Está correto somente o que se afirma em